Hi Ray,
Maybe it is a Jerk issue? MoveExp should honor the Velocity and Acceleration limits but not Jerk. What are you testing with GCode and the MDI, rapids or coordinated motion?
Also are the acceleration and velocity limits set the same in KMotion (counts/sec2) and KMotionCNC (in/sec^2) ?
Otherwise you may want to capture some data to a file so we can see exactly what is happening.
Regards
TK
| Group: DynoMotion |
Message: 3051 |
From: himykabibble |
Date: 1/10/2012 |
| Subject: Re: Jogging Problem |
Tom,
Hey! Who you calling a jerk?? :-)
The A axis is never used for coordinated motion - always single axis moves to set tool comp. I've moved it a whole lot by jogging and MDI, and it was used in the program I ran 5 times today, for doing tool-comp. Only the pendant causes it to fault.
I *think* I've set everything the same in both my Init.c and KMotionCNC, but maybe you could check my numbers:
Axis/Vel/Accel/Jerk in Init.c:
X&Y/70000/500000/4e+6
Z/51000/700000/4e+6
A/48000/20000/4e+6
Axis/StepsPerInch/MaxVel(IPM)/Accel(in/sec^2) in KMotionCNC:
X&Y/20000/200/25
Z/20320/150/25
A/96000/30/5
Regards,
Ray L.
--- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@...> wrote:
>
> Hi Ray,
> Â
> Maybe it is a Jerk issue? MoveExp should honor the Velocity and Acceleration limits but not Jerk. What are you testing with GCode and the MDI, rapids or coordinated motion?Â
> Â
> Also are the acceleration and velocity limits set the same in KMotion (counts/sec2) and KMotionCNC (in/sec^2)Â ?
> Â
> Otherwise you may want to capture some data to a file so we can see exactly what is happening.
> Â
> Regards
> TK
> Â
> Â
> Â
>
>
> ________________________________
> From: himykabibble <jagboy@...>
> To: DynoMotion@yahoogroups.com
> Sent: Tuesday, January 10, 2012 6:45 PM
> Subject: [DynoMotion] Jogging Problem
>
>
> Â
> Tom,
>
> I'm having a problem jogging with my pendant, only on the A axis, which is the knee. The knee, obviously, is very heavy, and very slow, compared to the other axes. X/Y/Z will jog at 200 IPM, with acceleration of 25 in/sec^2, while A will only jog at 30 IPM with accel of 5 in/sec^2. The problem I'm having with the A axis only is that unless I turn the MPG *very* slowly, the servo faults, which suggests the acceleration limit is not being respected. This does not occur on programmed moves, either running G-code programs or using MDI. The pendant uses MoveExp for doing these moves. Any ideas where I should look?
>
> The good news is, this seems to be the only significant problem I have!
>
> Regards,
> Ray L.
> |
|
| Group: DynoMotion |
Message: 3052 |
From: Tom Kerekes |
Date: 1/10/2012 |
| Subject: Re: Jogging Problem |
heh heh Ray,
Well there is a big difference in Acceleration between KMotion and KMotion.exe.
KMotion A axis = 20,000 cnts/sec2
KMotion.exe A Axis = 5 in/sec2 x 96000 cnts/in = 480,000 cnts/sec2
but that doesn't really explain it because the big number is only used for coordinated motion in KMotionCNC which you never use.
Jogging, MDI, and GCode all use the KMotion low setting of 20,000cnts/sec2 but they do honor Jerk so the acceleration is more gradual. Where the MPG MoveExp would apply the full acceleration instantly. So that could possibly explain it, but your Jerk setting of 4e6 is so high I wouldn't think it would help that much. 20,000/4e6 = 0.005 sec.
Still if it was very marginal it might. When you move on the Step Response Screen what size following errors do you see? What is your following error limit set at?
Regards
TK
| Group: DynoMotion |
Message: 3053 |
From: himykabibble |
Date: 1/10/2012 |
| Subject: Re: Jogging Problem |
Tom,
I'm using Geckos, and have no encoders tied back to the KFlop, so I can't see following error.
I guess I still have the KFlop accel set really low, trying to resolve this problem.
What is a reasonable value for jerk? I just left what was there....
Regards,
Ray L.
--- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@...> wrote:
>
> heh heh Ray,
> Â
> Well there is a big difference in Acceleration between KMotion and KMotion.exe.
> Â
> KMotion A axis = 20,000 cnts/sec2
> Â
> KMotion.exe A Axis = 5 in/sec2 x 96000 cnts/in = 480,000 cnts/sec2
> Â
> but that doesn't really explain it because the big number is only used for coordinated motion in KMotionCNC which you never use.
> Â
> Jogging, MDI, and GCode all use the KMotion low setting of 20,000cnts/sec2 but they do honor Jerk so the acceleration is more gradual. Where the MPG MoveExp would apply the full acceleration instantly. So that could possibly explain it, but your Jerk setting of 4e6 is so high I wouldn't think it would help that much. 20,000/4e6 = 0.005 sec.
> Â
> Still if it was very marginal it might. When you move on the Step Response Screen what size following errors do you see? What is your following error limit set at?
> Â
> Regards
> TK
> Â
> Â
> Â
>
>
> ________________________________
> From: himykabibble <jagboy@...>
> To: DynoMotion@yahoogroups.com
> Sent: Tuesday, January 10, 2012 8:01 PM
> Subject: [DynoMotion] Re: Jogging Problem
>
>
> Â
> Tom,
>
> Hey! Who you calling a jerk?? :-)
>
> The A axis is never used for coordinated motion - always single axis moves to set tool comp. I've moved it a whole lot by jogging and MDI, and it was used in the program I ran 5 times today, for doing tool-comp. Only the pendant causes it to fault.
>
> I *think* I've set everything the same in both my Init.c and KMotionCNC, but maybe you could check my numbers:
>
> Axis/Vel/Accel/Jerk in Init.c:
> X&Y/70000/500000/4e+6
> Z/51000/700000/4e+6
> A/48000/20000/4e+6
>
> Axis/StepsPerInch/MaxVel(IPM)/Accel(in/sec^2) in KMotionCNC:
> X&Y/20000/200/25
> Z/20320/150/25
> A/96000/30/5
>
> Regards,
> Ray L.
>
> --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> >
> > Hi Ray,
> > ÃÂ
> > Maybe it is a Jerk issue?ÃÂ MoveExp should honor the Velocity and Acceleration limits but not Jerk.ÃÂ What are you testing with GCode and the MDI, rapids or coordinated motion?ÃÂ
> > ÃÂ
> > Also are the acceleration and velocity limits set the same in KMotion (counts/sec2) and KMotionCNC (in/sec^2)ÃÂ ?
> > ÃÂ
> > Otherwise you may want to capture some data to a file so we can see exactly what is happening.
> > ÃÂ
> > Regards
> > TK
> > ÃÂ
> > ÃÂ
> > ÃÂ
> >
> >
> > ________________________________
> > From: himykabibble <jagboy@>
> > To: DynoMotion@yahoogroups.com
> > Sent: Tuesday, January 10, 2012 6:45 PM
> > Subject: [DynoMotion] Jogging Problem
> >
> >
> > ÃÂ
> > Tom,
> >
> > I'm having a problem jogging with my pendant, only on the A axis, which is the knee. The knee, obviously, is very heavy, and very slow, compared to the other axes. X/Y/Z will jog at 200 IPM, with acceleration of 25 in/sec^2, while A will only jog at 30 IPM with accel of 5 in/sec^2. The problem I'm having with the A axis only is that unless I turn the MPG *very* slowly, the servo faults, which suggests the acceleration limit is not being respected. This does not occur on programmed moves, either running G-code programs or using MDI. The pendant uses MoveExp for doing these moves. Any ideas where I should look?
> >
> > The good news is, this seems to be the only significant problem I have!
> >
> > Regards,
> > Ray L.
> >
> |
|
| Group: DynoMotion |
Message: 3056 |
From: Tom Kerekes |
Date: 1/10/2012 |
| Subject: Re: Jogging Problem |
Hi Ray,
I ran a test and captured some data. It seems MoveExp is honoring the Acceleration value correctly. See the attached plots. I've also included the C program that captures the data, the data, and an Excel sheet to plot it. Then I did a Move on the Step Response Screen with your Jerk limitation of 4e6. As predicted there is smoothing over the first few milliseconds which is within the first ~100 counts or so of motion. That could possibly make the difference. You might also be exciting an instability in your Servo if it isn't tuned well.
Its hard to say what is a reasonable value for Jerk. It is sort of like asking at what rate do you apply the brakes in your car to come to a quick but still smooth stop? Applying the brakes gradually will tend to take longer to stop, however by applying the brakes somewhat gradually will allow harder braking than what would otherwise be possible so the overall result is a stop as quick or quicker but with less shock.
From a motor standpoint it is impossible to apply instant acceleration (acceleration = torque = current). Because the motor has inductance and we have limited voltage it will take time to ramp up the current. But this effect is pretty small. Possibly in the order of a millisecond.
So the mechanics are usually the major determining factor. The idea is to apply the force over period of time so as to not excite the major resonant frequencies of the system. If the resonant frequencies are around 100 Hz (10 ms period) then we should apply the force over several times this period. To apply the force over 0.02 seconds the numeric value of Jerk would have to be 50X the acceleration value.
HTH
TK
| Group: DynoMotion |
Message: 3060 |
From: himykabibble |
Date: 1/10/2012 |
| Subject: Re: Jogging Problem |
Tom,
I'm confused.... Coordinated moves will not be controlling jerk at all, right? Isn't that equivalent to an infinite jerk? Why would coordindated moves work OK, but MoveExp not? I would expect, if anything, just the opposite.
It is already taking a long time to stop. In fact, only when jogging, with the pendant, it typically over-shoots by about an inch, then backs up.
In going over my code a while ago, I did find something that doesn't "smell" right, so I'll play with it some more tomorrow, and see if I'm right.
BTW - I use the web (primitive) forum, so didn't get any of your attachments.
Regards,
Ray L.
--- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@...> wrote:
>
> Hi Ray,
> Â
> I ran a test and captured some data. It seems MoveExp is honoring the Acceleration value correctly. See the attached plots. I've also included the C program that captures the data, the data, and an Excel sheet to plot it. Then I did a Move on the Step Response Screen with your Jerk limitation of 4e6. As predicted there is smoothing over the first few milliseconds which is within the first ~100 counts or so of motion. That could possibly make the difference. You might also be exciting an instability in your Servo if it isn't tuned well.
> Â
> Its hard to say what is a reasonable value for Jerk. It is sort of like asking at what rate do you apply the brakes in your car to come to a quick but still smooth stop? Applying the brakes gradually will tend to take longer to stop, however by applying the brakes somewhat gradually will allow harder braking than what would otherwise be possible so the overall result is a stop as quick or quicker but with less shock.
> Â
> From a motor standpoint it is impossible to apply instant acceleration (acceleration = torque = current). Because the motor has inductance and we have limited voltage it will take time to ramp up the current. But this effect is pretty small. Possibly in the order of a millisecond.
> Â
> So the mechanics are usually the major determining factor. The idea is to apply the force over period of time so as to not excite the major resonant frequencies of the system. If the resonant frequencies are around 100 Hz (10 ms period) then we should apply the force over several times this period. To apply the force over 0.02 seconds the numeric value of Jerk would have to be 50X the acceleration value.
> Â
> HTH
> TK
>
> From: himykabibble <jagboy@...>
> To: DynoMotion@yahoogroups.com
> Sent: Tuesday, January 10, 2012 8:55 PM
> Subject: [DynoMotion] Re: Jogging Problem
>
>
> Â
> Tom,
>
> I'm using Geckos, and have no encoders tied back to the KFlop, so I can't see following error.
>
> I guess I still have the KFlop accel set really low, trying to resolve this problem.
>
> What is a reasonable value for jerk? I just left what was there....
>
> Regards,
> Ray L.
>
> --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> >
> > heh heh Ray,
> > ÃÂ
> > Well there is a big difference in Acceleration between KMotion and KMotion.exe.
> > ÃÂ
> > KMotion A axis = 20,000 cnts/sec2
> > ÃÂ
> > KMotion.exe A Axis = 5 in/sec2 x 96000 cnts/in = 480,000 cnts/sec2
> > ÃÂ
> > but that doesn't really explain it because the big number is only used for coordinated motion in KMotionCNC which you never use.
> > ÃÂ
> > Jogging, MDI, and GCode all use the KMotion low setting of 20,000cnts/sec2 but they do honor Jerk so the acceleration is more gradual.ÃÂ Where the MPG MoveExp would apply the full acceleration instantly.ÃÂ So that could possibly explain it, but your Jerk setting of 4e6 is so high I wouldn't think it would help that much.ÃÂ 20,000/4e6 = 0.005 sec.
> > ÃÂ
> > Still if it was very marginal it might.ÃÂ When you move on the Step Response Screen what size following errors do you see?ÃÂ What is your following error limit set at?
> > ÃÂ
> > Regards
> > TK
> > ÃÂ
> > ÃÂ
> > ÃÂ
> >
> >
> > ________________________________
> > From: himykabibble <jagboy@>
> > To: DynoMotion@yahoogroups.com
> > Sent: Tuesday, January 10, 2012 8:01 PM
> > Subject: [DynoMotion] Re: Jogging Problem
> >
> >
> > ÃÂ
> > Tom,
> >
> > Hey! Who you calling a jerk?? :-)
> >
> > The A axis is never used for coordinated motion - always single axis moves to set tool comp. I've moved it a whole lot by jogging and MDI, and it was used in the program I ran 5 times today, for doing tool-comp. Only the pendant causes it to fault.
> >
> > I *think* I've set everything the same in both my Init.c and KMotionCNC, but maybe you could check my numbers:
> >
> > Axis/Vel/Accel/Jerk in Init.c:
> > X&Y/70000/500000/4e+6
> > Z/51000/700000/4e+6
> > A/48000/20000/4e+6
> >
> > Axis/StepsPerInch/MaxVel(IPM)/Accel(in/sec^2) in KMotionCNC:
> > X&Y/20000/200/25
> > Z/20320/150/25
> > A/96000/30/5
> >
> > Regards,
> > Ray L.
> >
> > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > >
> > > Hi Ray,
> > > ÃâÃÂ
> > > Maybe it is a Jerk issue?ÃâàMoveExp should honor the Velocity and Acceleration limits but not Jerk.ÃâàWhat are you testing with GCode and the MDI, rapids or coordinated motion?ÃâÃÂ
> > > ÃâÃÂ
> > > Also are the acceleration and velocity limits set the same in KMotion (counts/sec2) and KMotionCNC (in/sec^2)Ãâà?
> > > ÃâÃÂ
> > > Otherwise you may want to capture some data to a file so we can see exactly what is happening.
> > > ÃâÃÂ
> > > Regards
> > > TK
> > > ÃâÃÂ
> > > ÃâÃÂ
> > > ÃâÃÂ
> > >
> > >
> > > ________________________________
> > > From: himykabibble <jagboy@>
> > > To: DynoMotion@yahoogroups.com
> > > Sent: Tuesday, January 10, 2012 6:45 PM
> > > Subject: [DynoMotion] Jogging Problem
> > >
> > >
> > > ÃâÃÂ
> > > Tom,
> > >
> > > I'm having a problem jogging with my pendant, only on the A axis, which is the knee. The knee, obviously, is very heavy, and very slow, compared to the other axes. X/Y/Z will jog at 200 IPM, with acceleration of 25 in/sec^2, while A will only jog at 30 IPM with accel of 5 in/sec^2. The problem I'm having with the A axis only is that unless I turn the MPG *very* slowly, the servo faults, which suggests the acceleration limit is not being respected. This does not occur on programmed moves, either running G-code programs or using MDI. The pendant uses MoveExp for doing these moves. Any ideas where I should look?
> > >
> > > The good news is, this seems to be the only significant problem I have!
> > >
> > > Regards,
> > > Ray L.
> > >
> >
> |
|
| Group: DynoMotion |
Message: 3061 |
From: Tom Kerekes |
Date: 1/10/2012 |
| Subject: Re: Jogging Problem |
Hi Ray,
You said you never use coordinated moves so let's put that out of the discussion.
Jogging, MDI Rapids, GCode Rapids all do consider the Jerk Limit and work OK
MoveExp does not have any Jerk Limit and fails.
Good chance it is something else entirely but it is a possibility.
Regarding the attachments. On the Yahoo Web interface if you scroll down to the bottom of the message doesn't it show the attachments?
Regards
TK
| Group: DynoMotion |
Message: 3062 |
From: himykabibble |
Date: 1/11/2012 |
| Subject: Re: Jogging Problem |
Tom,
I'll play with it some more today, and see if I can get more clues.
No, all attachments disappear before they make it to the web forum. The Yahoo web forum has to be about the most primitive forum on the planet. If you haven't taken a look at it, you should sometime. a large percentage of messages come through kinda trashed - lots of weird characters, formatting completely whacked, etc. I don't think it's changed since the '90s....
Regards,
Ray L.
--- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@...> wrote:
>
> Hi Ray,
> Â
> You said you never use coordinated moves so let's put that out of the discussion.
> Â
> Jogging, MDI Rapids, GCode Rapids all do consider the Jerk Limit and work OK
> Â
> MoveExp does not have any Jerk Limit and fails.
> Â
> Good chance it is something else entirely but it is a possibility.
> Â
> Regarding the attachments. On the Yahoo Web interface if you scroll down to the bottom of the message doesn't it show the attachments?
> Â
> Regards
> TK
> Â
> Â
>
> From: himykabibble <jagboy@...>
> To: DynoMotion@yahoogroups.com
> Sent: Tuesday, January 10, 2012 11:23 PM
> Subject: [DynoMotion] Re: Jogging Problem
>
>
> Â
> Tom,
>
> I'm confused.... Coordinated moves will not be controlling jerk at all, right? Isn't that equivalent to an infinite jerk? Why would coordindated moves work OK, but MoveExp not? I would expect, if anything, just the opposite.
>
> It is already taking a long time to stop. In fact, only when jogging, with the pendant, it typically over-shoots by about an inch, then backs up.
>
> In going over my code a while ago, I did find something that doesn't "smell" right, so I'll play with it some more tomorrow, and see if I'm right.
>
> BTW - I use the web (primitive) forum, so didn't get any of your attachments.
>
> Regards,
> Ray L.
>
> --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> >
> > Hi Ray,
> > ÃÂ
> > I ran a test and captured some data.ÃÂ It seems MoveExp is honoring the Acceleration value correctly.ÃÂ See the attached plots.ÃÂ I've also included the C program that captures the data, the data, and an Excel sheet to plot it.ÃÂ Then I did a Move on the Step Response Screen with your Jerk limitation of 4e6.ÃÂ As predicted there is smoothing over the first few milliseconds which is within the first ~100 counts or so of motion.ÃÂ That could possibly make the difference.ÃÂ You might also be exciting an instability in your Servo if it isn't tuned well.
> > ÃÂ
> > Its hard to say what is a reasonable value for Jerk.ÃÂ It is sort of like asking at what rate do you apply the brakes in your car to come to a quick but still smooth stop?ÃÂ Applying the brakes gradually will tend to take longer to stop, however by applying the brakes somewhat gradually will allow harder braking than what would otherwise be possible so the overall result is a stop as quick or quicker but with less shock.
> > ÃÂ
> > From a motor standpoint it is impossible to apply instant acceleration (acceleration = torque = current).ÃÂ Because the motor has inductance and we have limited voltage it will take time to ramp up the current.ÃÂ But this effect is pretty small.ÃÂ Possibly in the order of a millisecond.
> > ÃÂ
> > So the mechanics are usually the major determining factor.ÃÂ The idea is to apply the force overÃÂ period of time so as to not excite the major resonant frequencies of the system.ÃÂ If the resonant frequencies are around 100 Hz (10 ms period) then we should apply the force overÃÂ several times this period.ÃÂ To apply the force overÃÂ 0.02 seconds the numeric value of JerkÃÂ would have to be 50X the acceleration value.
> > ÃÂ
> > HTH
> > TK
> >
> > From: himykabibble <jagboy@>
> > To: DynoMotion@yahoogroups.com
> > Sent: Tuesday, January 10, 2012 8:55 PM
> > Subject: [DynoMotion] Re: Jogging Problem
> >
> >
> > ÃÂ
> > Tom,
> >
> > I'm using Geckos, and have no encoders tied back to the KFlop, so I can't see following error.
> >
> > I guess I still have the KFlop accel set really low, trying to resolve this problem.
> >
> > What is a reasonable value for jerk? I just left what was there....
> >
> > Regards,
> > Ray L.
> >
> > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > >
> > > heh heh Ray,
> > > ÃâÃÂ
> > > Well there is a big difference in Acceleration between KMotion and KMotion.exe.
> > > ÃâÃÂ
> > > KMotion A axis = 20,000 cnts/sec2
> > > ÃâÃÂ
> > > KMotion.exe A Axis = 5 in/sec2 x 96000 cnts/in = 480,000 cnts/sec2
> > > ÃâÃÂ
> > > but that doesn't really explain it because the big number is only used for coordinated motion in KMotionCNC which you never use.
> > > ÃâÃÂ
> > > Jogging, MDI, and GCode all use the KMotion low setting of 20,000cnts/sec2 but they do honor Jerk so the acceleration is more gradual.ÃâàWhere the MPG MoveExp would apply the full acceleration instantly.ÃâàSo that could possibly explain it, but your Jerk setting of 4e6 is so high I wouldn't think it would help that much.Ãâà20,000/4e6 = 0.005 sec.
> > > ÃâÃÂ
> > > Still if it was very marginal it might.ÃâàWhen you move on the Step Response Screen what size following errors do you see?ÃâàWhat is your following error limit set at?
> > > ÃâÃÂ
> > > Regards
> > > TK
> > > ÃâÃÂ
> > > ÃâÃÂ
> > > ÃâÃÂ
> > >
> > >
> > > ________________________________
> > > From: himykabibble <jagboy@>
> > > To: DynoMotion@yahoogroups.com
> > > Sent: Tuesday, January 10, 2012 8:01 PM
> > > Subject: [DynoMotion] Re: Jogging Problem
> > >
> > >
> > > ÃâÃÂ
> > > Tom,
> > >
> > > Hey! Who you calling a jerk?? :-)
> > >
> > > The A axis is never used for coordinated motion - always single axis moves to set tool comp. I've moved it a whole lot by jogging and MDI, and it was used in the program I ran 5 times today, for doing tool-comp. Only the pendant causes it to fault.
> > >
> > > I *think* I've set everything the same in both my Init.c and KMotionCNC, but maybe you could check my numbers:
> > >
> > > Axis/Vel/Accel/Jerk in Init.c:
> > > X&Y/70000/500000/4e+6
> > > Z/51000/700000/4e+6
> > > A/48000/20000/4e+6
> > >
> > > Axis/StepsPerInch/MaxVel(IPM)/Accel(in/sec^2) in KMotionCNC:
> > > X&Y/20000/200/25
> > > Z/20320/150/25
> > > A/96000/30/5
> > >
> > > Regards,
> > > Ray L.
> > >
> > > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > > >
> > > > Hi Ray,
> > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > Maybe it is a Jerk issue?ÃÆ'ââ¬Å¡ÃâàMoveExp should honor the Velocity and Acceleration limits but not Jerk.ÃÆ'ââ¬Å¡ÃâàWhat are you testing with GCode and the MDI, rapids or coordinated motion?ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > Also are the acceleration and velocity limits set the same in KMotion (counts/sec2) and KMotionCNC (in/sec^2)ÃÆ'ââ¬Å¡Ãâà?
> > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > Otherwise you may want to capture some data to a file so we can see exactly what is happening.
> > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > Regards
> > > > TK
> > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > >
> > > >
> > > > ________________________________
> > > > From: himykabibble <jagboy@>
> > > > To: DynoMotion@yahoogroups.com
> > > > Sent: Tuesday, January 10, 2012 6:45 PM
> > > > Subject: [DynoMotion] Jogging Problem
> > > >
> > > >
> > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > Tom,
> > > >
> > > > I'm having a problem jogging with my pendant, only on the A axis, which is the knee. The knee, obviously, is very heavy, and very slow, compared to the other axes. X/Y/Z will jog at 200 IPM, with acceleration of 25 in/sec^2, while A will only jog at 30 IPM with accel of 5 in/sec^2. The problem I'm having with the A axis only is that unless I turn the MPG *very* slowly, the servo faults, which suggests the acceleration limit is not being respected. This does not occur on programmed moves, either running G-code programs or using MDI. The pendant uses MoveExp for doing these moves. Any ideas where I should look?
> > > >
> > > > The good news is, this seems to be the only significant problem I have!
> > > >
> > > > Regards,
> > > > Ray L.
> > > >
> > >
> >
> |
|
| Group: DynoMotion |
Message: 3063 |
From: himykabibble |
Date: 1/11/2012 |
| Subject: Re: Jogging Problem |
Tom,
I've found what's causing the problem but don't know what to do about it. I noticed the problem was most prevalent when stopping, so I commented out the code that issues the last move command, and I no longer get faults. What I get instead, is overshoot, and oscillation. The move goes fine, but when I stop the MPG, the A axis overshoots by about an inch, then backs up, and overshoots in the other direction, and ends up in a lightly damped oscillation that finally stops after about 30 seconds or so. The other axes don't do this, so the problem must be related to the low acceleration on the A axis. I use MoveExp to do the moves when the MPG is turning, and when I detect the MPG is no longer turning, I issue a final Move() (not MoveExp) to the same position commanded in the last MoveExp. It is that final Move that seems to be doing me in. Comment it out, and no more faults, just oscillation. I also tried a Jog(A, 0.0), but that also causes faults.
BTW - How can I tell if the app is in E-Stop? When I hit the on-screen E-Stop button I want it to E-Stop my drives as well (i.e. - cut power). Right now, E-Stopping the app does not disable the drives, and E-stopping the drives (through the pendant or E-Stop switches) does not give a notification to KMotionCNC that state has changed. I assume it would be advisable for my Init to monitor the E-Stop switch input, and disable all axes if it goes active, right? And that will, in turn, notify KMotionCNC?
Regards,
Ray L.
--- In DynoMotion@yahoogroups.com, "himykabibble" <jagboy@...> wrote:
>
> Tom,
>
> I'll play with it some more today, and see if I can get more clues.
>
> No, all attachments disappear before they make it to the web forum. The Yahoo web forum has to be about the most primitive forum on the planet. If you haven't taken a look at it, you should sometime. a large percentage of messages come through kinda trashed - lots of weird characters, formatting completely whacked, etc. I don't think it's changed since the '90s....
>
> Regards,
> Ray L.
>
> --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> >
> > Hi Ray,
> > Â
> > You said you never use coordinated moves so let's put that out of the discussion.
> > Â
> > Jogging, MDI Rapids, GCode Rapids all do consider the Jerk Limit and work OK
> > Â
> > MoveExp does not have any Jerk Limit and fails.
> > Â
> > Good chance it is something else entirely but it is a possibility.
> > Â
> > Regarding the attachments. On the Yahoo Web interface if you scroll down to the bottom of the message doesn't it show the attachments?
> > Â
> > Regards
> > TK
> > Â
> > Â
> >
> > From: himykabibble <jagboy@>
> > To: DynoMotion@yahoogroups.com
> > Sent: Tuesday, January 10, 2012 11:23 PM
> > Subject: [DynoMotion] Re: Jogging Problem
> >
> >
> > Â
> > Tom,
> >
> > I'm confused.... Coordinated moves will not be controlling jerk at all, right? Isn't that equivalent to an infinite jerk? Why would coordindated moves work OK, but MoveExp not? I would expect, if anything, just the opposite.
> >
> > It is already taking a long time to stop. In fact, only when jogging, with the pendant, it typically over-shoots by about an inch, then backs up.
> >
> > In going over my code a while ago, I did find something that doesn't "smell" right, so I'll play with it some more tomorrow, and see if I'm right.
> >
> > BTW - I use the web (primitive) forum, so didn't get any of your attachments.
> >
> > Regards,
> > Ray L.
> >
> > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > >
> > > Hi Ray,
> > > ÃÂ
> > > I ran a test and captured some data.ÃÂ It seems MoveExp is honoring the Acceleration value correctly.ÃÂ See the attached plots.ÃÂ I've also included the C program that captures the data, the data, and an Excel sheet to plot it.ÃÂ Then I did a Move on the Step Response Screen with your Jerk limitation of 4e6.ÃÂ As predicted there is smoothing over the first few milliseconds which is within the first ~100 counts or so of motion.ÃÂ That could possibly make the difference.ÃÂ You might also be exciting an instability in your Servo if it isn't tuned well.
> > > ÃÂ
> > > Its hard to say what is a reasonable value for Jerk.ÃÂ It is sort of like asking at what rate do you apply the brakes in your car to come to a quick but still smooth stop?ÃÂ Applying the brakes gradually will tend to take longer to stop, however by applying the brakes somewhat gradually will allow harder braking than what would otherwise be possible so the overall result is a stop as quick or quicker but with less shock.
> > > ÃÂ
> > > From a motor standpoint it is impossible to apply instant acceleration (acceleration = torque = current).ÃÂ Because the motor has inductance and we have limited voltage it will take time to ramp up the current.ÃÂ But this effect is pretty small.ÃÂ Possibly in the order of a millisecond.
> > > ÃÂ
> > > So the mechanics are usually the major determining factor.ÃÂ The idea is to apply the force overÃÂ period of time so as to not excite the major resonant frequencies of the system.ÃÂ If the resonant frequencies are around 100 Hz (10 ms period) then we should apply the force overÃÂ several times this period.ÃÂ To apply the force overÃÂ 0.02 seconds the numeric value of JerkÃÂ would have to be 50X the acceleration value.
> > > ÃÂ
> > > HTH
> > > TK
> > >
> > > From: himykabibble <jagboy@>
> > > To: DynoMotion@yahoogroups.com
> > > Sent: Tuesday, January 10, 2012 8:55 PM
> > > Subject: [DynoMotion] Re: Jogging Problem
> > >
> > >
> > > ÃÂ
> > > Tom,
> > >
> > > I'm using Geckos, and have no encoders tied back to the KFlop, so I can't see following error.
> > >
> > > I guess I still have the KFlop accel set really low, trying to resolve this problem.
> > >
> > > What is a reasonable value for jerk? I just left what was there....
> > >
> > > Regards,
> > > Ray L.
> > >
> > > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > > >
> > > > heh heh Ray,
> > > > ÃâÃÂ
> > > > Well there is a big difference in Acceleration between KMotion and KMotion.exe.
> > > > ÃâÃÂ
> > > > KMotion A axis = 20,000 cnts/sec2
> > > > ÃâÃÂ
> > > > KMotion.exe A Axis = 5 in/sec2 x 96000 cnts/in = 480,000 cnts/sec2
> > > > ÃâÃÂ
> > > > but that doesn't really explain it because the big number is only used for coordinated motion in KMotionCNC which you never use.
> > > > ÃâÃÂ
> > > > Jogging, MDI, and GCode all use the KMotion low setting of 20,000cnts/sec2 but they do honor Jerk so the acceleration is more gradual.ÃâàWhere the MPG MoveExp would apply the full acceleration instantly.ÃâàSo that could possibly explain it, but your Jerk setting of 4e6 is so high I wouldn't think it would help that much.Ãâà20,000/4e6 = 0.005 sec.
> > > > ÃâÃÂ
> > > > Still if it was very marginal it might.ÃâàWhen you move on the Step Response Screen what size following errors do you see?ÃâàWhat is your following error limit set at?
> > > > ÃâÃÂ
> > > > Regards
> > > > TK
> > > > ÃâÃÂ
> > > > ÃâÃÂ
> > > > ÃâÃÂ
> > > >
> > > >
> > > > ________________________________
> > > > From: himykabibble <jagboy@>
> > > > To: DynoMotion@yahoogroups.com
> > > > Sent: Tuesday, January 10, 2012 8:01 PM
> > > > Subject: [DynoMotion] Re: Jogging Problem
> > > >
> > > >
> > > > ÃâÃÂ
> > > > Tom,
> > > >
> > > > Hey! Who you calling a jerk?? :-)
> > > >
> > > > The A axis is never used for coordinated motion - always single axis moves to set tool comp. I've moved it a whole lot by jogging and MDI, and it was used in the program I ran 5 times today, for doing tool-comp. Only the pendant causes it to fault.
> > > >
> > > > I *think* I've set everything the same in both my Init.c and KMotionCNC, but maybe you could check my numbers:
> > > >
> > > > Axis/Vel/Accel/Jerk in Init.c:
> > > > X&Y/70000/500000/4e+6
> > > > Z/51000/700000/4e+6
> > > > A/48000/20000/4e+6
> > > >
> > > > Axis/StepsPerInch/MaxVel(IPM)/Accel(in/sec^2) in KMotionCNC:
> > > > X&Y/20000/200/25
> > > > Z/20320/150/25
> > > > A/96000/30/5
> > > >
> > > > Regards,
> > > > Ray L.
> > > >
> > > > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > > > >
> > > > > Hi Ray,
> > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > Maybe it is a Jerk issue?ÃÆ'ââ¬Å¡ÃâàMoveExp should honor the Velocity and Acceleration limits but not Jerk.ÃÆ'ââ¬Å¡ÃâàWhat are you testing with GCode and the MDI, rapids or coordinated motion?ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > Also are the acceleration and velocity limits set the same in KMotion (counts/sec2) and KMotionCNC (in/sec^2)ÃÆ'ââ¬Å¡Ãâà?
> > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > Otherwise you may want to capture some data to a file so we can see exactly what is happening.
> > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > Regards
> > > > > TK
> > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > >
> > > > >
> > > > > ________________________________
> > > > > From: himykabibble <jagboy@>
> > > > > To: DynoMotion@yahoogroups.com
> > > > > Sent: Tuesday, January 10, 2012 6:45 PM
> > > > > Subject: [DynoMotion] Jogging Problem
> > > > >
> > > > >
> > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > Tom,
> > > > >
> > > > > I'm having a problem jogging with my pendant, only on the A axis, which is the knee. The knee, obviously, is very heavy, and very slow, compared to the other axes. X/Y/Z will jog at 200 IPM, with acceleration of 25 in/sec^2, while A will only jog at 30 IPM with accel of 5 in/sec^2. The problem I'm having with the A axis only is that unless I turn the MPG *very* slowly, the servo faults, which suggests the acceleration limit is not being respected. This does not occur on programmed moves, either running G-code programs or using MDI. The pendant uses MoveExp for doing these moves. Any ideas where I should look?
> > > > >
> > > > > The good news is, this seems to be the only significant problem I have!
> > > > >
> > > > > Regards,
> > > > > Ray L.
> > > > >
> > > >
> > >
> >
> |
|
| Group: DynoMotion |
Message: 3065 |
From: Tom Kerekes |
Date: 1/11/2012 |
| Subject: Re: Jogging Problem |
Hi Ray,
I can't think of how that oscillation could be happening. One overshoot could happen if while at high speed the target position was set too close to be able to stop. Does it still overshoot/oscillate with your program halted?
The Screen EStop in KMotionCNC should disable all the axes. Doesn't that occurr?
Regards
TK
| Group: DynoMotion |
Message: 3067 |
From: himykabibble |
Date: 1/11/2012 |
| Subject: Re: Jogging Problem |
Tom,
Haven't tried halting my program, but I can do that tomorrow, and see what happens.
I expect E-Stop does disabled the axes within KFlop, but I would like to also negate a Pin that will drop my main power contactor, to de-power the drives. Is there a way to do that?
Regards,
Ray L.
--- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@...> wrote:
>
> Hi Ray,
> Â
> I can't think of how that oscillation could be happening. One overshoot could happen if while at high speed the target position was set too close to be able to stop. Does it still overshoot/oscillate with your program halted?
> Â
> The Screen EStop in KMotionCNC should disable all the axes. Doesn't that occurr?
> Â
> Regards
> TKÂ Â
>
>
> ________________________________
> From: himykabibble <jagboy@...>
> To: DynoMotion@yahoogroups.com
> Sent: Wednesday, January 11, 2012 12:14 PM
> Subject: [DynoMotion] Re: Jogging Problem
>
>
> Â
> Tom,
>
> I've found what's causing the problem but don't know what to do about it. I noticed the problem was most prevalent when stopping, so I commented out the code that issues the last move command, and I no longer get faults. What I get instead, is overshoot, and oscillation. The move goes fine, but when I stop the MPG, the A axis overshoots by about an inch, then backs up, and overshoots in the other direction, and ends up in a lightly damped oscillation that finally stops after about 30 seconds or so. The other axes don't do this, so the problem must be related to the low acceleration on the A axis. I use MoveExp to do the moves when the MPG is turning, and when I detect the MPG is no longer turning, I issue a final Move() (not MoveExp) to the same position commanded in the last MoveExp. It is that final Move that seems to be doing me in. Comment it out, and no more faults, just oscillation. I also tried a Jog(A, 0.0), but that also causes faults.
>
> BTW - How can I tell if the app is in E-Stop? When I hit the on-screen E-Stop button I want it to E-Stop my drives as well (i.e. - cut power). Right now, E-Stopping the app does not disable the drives, and E-stopping the drives (through the pendant or E-Stop switches) does not give a notification to KMotionCNC that state has changed. I assume it would be advisable for my Init to monitor the E-Stop switch input, and disable all axes if it goes active, right? And that will, in turn, notify KMotionCNC?
>
> Regards,
> Ray L.
>
> --- In DynoMotion@yahoogroups.com, "himykabibble" <jagboy@> wrote:
> >
> > Tom,
> >
> > I'll play with it some more today, and see if I can get more clues.
> >
> > No, all attachments disappear before they make it to the web forum. The Yahoo web forum has to be about the most primitive forum on the planet. If you haven't taken a look at it, you should sometime. a large percentage of messages come through kinda trashed - lots of weird characters, formatting completely whacked, etc. I don't think it's changed since the '90s....
> >
> > Regards,
> > Ray L.
> >
> > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > >
> > > Hi Ray,
> > > ÃÂ
> > > You said you never use coordinated moves so let's put that out of the discussion.
> > > ÃÂ
> > > Jogging, MDI Rapids, GCode Rapids all do consider the Jerk Limit and work OK
> > > ÃÂ
> > > MoveExp does not have any Jerk Limit and fails.
> > > ÃÂ
> > > Good chance it is something else entirely but it is a possibility.
> > > ÃÂ
> > > Regarding the attachments.ÃÂ On the Yahoo Web interface if you scroll down to the bottom of the message doesn't it show the attachments?
> > > ÃÂ
> > > Regards
> > > TK
> > > ÃÂ
> > > ÃÂ
> > >
> > > From: himykabibble <jagboy@>
> > > To: DynoMotion@yahoogroups.com
> > > Sent: Tuesday, January 10, 2012 11:23 PM
> > > Subject: [DynoMotion] Re: Jogging Problem
> > >
> > >
> > > ÃÂ
> > > Tom,
> > >
> > > I'm confused.... Coordinated moves will not be controlling jerk at all, right? Isn't that equivalent to an infinite jerk? Why would coordindated moves work OK, but MoveExp not? I would expect, if anything, just the opposite.
> > >
> > > It is already taking a long time to stop. In fact, only when jogging, with the pendant, it typically over-shoots by about an inch, then backs up.
> > >
> > > In going over my code a while ago, I did find something that doesn't "smell" right, so I'll play with it some more tomorrow, and see if I'm right.
> > >
> > > BTW - I use the web (primitive) forum, so didn't get any of your attachments.
> > >
> > > Regards,
> > > Ray L.
> > >
> > > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > > >
> > > > Hi Ray,
> > > > ÃâÃÂ
> > > > I ran a test and captured some data.ÃâàIt seems MoveExp is honoring the Acceleration value correctly.ÃâàSee the attached plots.ÃâàI've also included the C program that captures the data, the data, and an Excel sheet to plot it.ÃâàThen I did a Move on the Step Response Screen with your Jerk limitation of 4e6.ÃâàAs predicted there is smoothing over the first few milliseconds which is within the first ~100 counts or so of motion.ÃâàThat could possibly make the difference.ÃâàYou might also be exciting an instability in your Servo if it isn't tuned well.
> > > > ÃâÃÂ
> > > > Its hard to say what is a reasonable value for Jerk.ÃâàIt is sort of like asking at what rate do you apply the brakes in your car to come to a quick but still smooth stop?ÃâàApplying the brakes gradually will tend to take longer to stop, however by applying the brakes somewhat gradually will allow harder braking than what would otherwise be possible so the overall result is a stop as quick or quicker but with less shock.
> > > > ÃâÃÂ
> > > > From a motor standpoint it is impossible to apply instant acceleration (acceleration = torque = current).ÃâàBecause the motor has inductance and we have limited voltage it will take time to ramp up the current.ÃâàBut this effect is pretty small.ÃâàPossibly in the order of a millisecond.
> > > > ÃâÃÂ
> > > > So the mechanics are usually the major determining factor.ÃâàThe idea is to apply the force overÃâàperiod of time so as to not excite the major resonant frequencies of the system.ÃâàIf the resonant frequencies are around 100 Hz (10 ms period) then we should apply the force overÃâàseveral times this period.ÃâàTo apply the force overÃâà0.02 seconds the numeric value of JerkÃâàwould have to be 50X the acceleration value.
> > > > ÃâÃÂ
> > > > HTH
> > > > TK
> > > >
> > > > From: himykabibble <jagboy@>
> > > > To: DynoMotion@yahoogroups.com
> > > > Sent: Tuesday, January 10, 2012 8:55 PM
> > > > Subject: [DynoMotion] Re: Jogging Problem
> > > >
> > > >
> > > > ÃâÃÂ
> > > > Tom,
> > > >
> > > > I'm using Geckos, and have no encoders tied back to the KFlop, so I can't see following error.
> > > >
> > > > I guess I still have the KFlop accel set really low, trying to resolve this problem.
> > > >
> > > > What is a reasonable value for jerk? I just left what was there....
> > > >
> > > > Regards,
> > > > Ray L.
> > > >
> > > > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > > > >
> > > > > heh heh Ray,
> > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > Well there is a big difference in Acceleration between KMotion and KMotion.exe.
> > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > KMotion A axis = 20,000 cnts/sec2
> > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > KMotion.exe A Axis = 5 in/sec2 x 96000 cnts/in = 480,000 cnts/sec2
> > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > but that doesn't really explain it because the big number is only used for coordinated motion in KMotionCNC which you never use.
> > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > Jogging, MDI, and GCode all use the KMotion low setting of 20,000cnts/sec2 but they do honor Jerk so the acceleration is more gradual.ÃÆ'ââ¬Å¡ÃâàWhere the MPG MoveExp would apply the full acceleration instantly.ÃÆ'ââ¬Å¡ÃâàSo that could possibly explain it, but your Jerk setting of 4e6 is so high I wouldn't think it would help that much.ÃÆ'ââ¬Å¡Ãâà20,000/4e6 = 0.005 sec.
> > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > Still if it was very marginal it might.ÃÆ'ââ¬Å¡ÃâàWhen you move on the Step Response Screen what size following errors do you see?ÃÆ'ââ¬Å¡ÃâàWhat is your following error limit set at?
> > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > Regards
> > > > > TK
> > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > >
> > > > >
> > > > > ________________________________
> > > > > From: himykabibble <jagboy@>
> > > > > To: DynoMotion@yahoogroups.com
> > > > > Sent: Tuesday, January 10, 2012 8:01 PM
> > > > > Subject: [DynoMotion] Re: Jogging Problem
> > > > >
> > > > >
> > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > Tom,
> > > > >
> > > > > Hey! Who you calling a jerk?? :-)
> > > > >
> > > > > The A axis is never used for coordinated motion - always single axis moves to set tool comp. I've moved it a whole lot by jogging and MDI, and it was used in the program I ran 5 times today, for doing tool-comp. Only the pendant causes it to fault.
> > > > >
> > > > > I *think* I've set everything the same in both my Init.c and KMotionCNC, but maybe you could check my numbers:
> > > > >
> > > > > Axis/Vel/Accel/Jerk in Init.c:
> > > > > X&Y/70000/500000/4e+6
> > > > > Z/51000/700000/4e+6
> > > > > A/48000/20000/4e+6
> > > > >
> > > > > Axis/StepsPerInch/MaxVel(IPM)/Accel(in/sec^2) in KMotionCNC:
> > > > > X&Y/20000/200/25
> > > > > Z/20320/150/25
> > > > > A/96000/30/5
> > > > >
> > > > > Regards,
> > > > > Ray L.
> > > > >
> > > > > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > > > > >
> > > > > > Hi Ray,
> > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > Maybe it is a Jerk issue?ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàMoveExp should honor the Velocity and Acceleration limits but not Jerk.ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàWhat are you testing with GCode and the MDI, rapids or coordinated motion?ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > Also are the acceleration and velocity limits set the same in KMotion (counts/sec2) and KMotionCNC (in/sec^2)ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡Ãâà?
> > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > Otherwise you may want to capture some data to a file so we can see exactly what is happening.
> > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > Regards
> > > > > > TK
> > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > >
> > > > > >
> > > > > > ________________________________
> > > > > > From: himykabibble <jagboy@>
> > > > > > To: DynoMotion@yahoogroups.com
> > > > > > Sent: Tuesday, January 10, 2012 6:45 PM
> > > > > > Subject: [DynoMotion] Jogging Problem
> > > > > >
> > > > > >
> > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > Tom,
> > > > > >
> > > > > > I'm having a problem jogging with my pendant, only on the A axis, which is the knee. The knee, obviously, is very heavy, and very slow, compared to the other axes. X/Y/Z will jog at 200 IPM, with acceleration of 25 in/sec^2, while A will only jog at 30 IPM with accel of 5 in/sec^2. The problem I'm having with the A axis only is that unless I turn the MPG *very* slowly, the servo faults, which suggests the acceleration limit is not being respected. This does not occur on programmed moves, either running G-code programs or using MDI. The pendant uses MoveExp for doing these moves. Any ideas where I should look?
> > > > > >
> > > > > > The good news is, this seems to be the only significant problem I have!
> > > > > >
> > > > > > Regards,
> > > > > > Ray L.
> > > > > >
> > > > >
> > > >
> > >
> >
> |
|
| Group: DynoMotion |
Message: 3069 |
From: Tom Kerekes |
Date: 1/11/2012 |
| Subject: Re: Jogging Problem |
Hi Ray,
We should probably add that similar to what Mach3 does. But you can just monitor the enables in KFLOP and if any become disabled then do whatever you wish. Then remember to re-engage the contactor or whatever when you enable the axes.
Regards
TK
| Group: DynoMotion |
Message: 3078 |
From: himykabibble |
Date: 1/12/2012 |
| Subject: Re: Jogging Problem |
Tom,
On A axis the jogging issue, I suppose it is a tuning problem. If I start a jog, then kill my thread, the oscillation continues, so it is coming from the MoveExp, which tells me it is not happy with the TAU value I'm using (0.08). But, if I increase TAU, then the response on the others axes goes to hell, with over-shoots, and very sluggish stops. I suspect, at a minimum, I'll need to set a different TAU for the A axis, because I REALLY like the "feel" I have right now on the other three axes.
Regards,
Ray L.
--- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@...> wrote:
>
> Hi Ray,
> Â
> We should probably add that similar to what Mach3 does. But you can just monitor the enables in KFLOP and if any become disabled then do whatever you wish. Then remember to re-engage the contactor or whatever when you enable the axes.
> Â
> Regards
> TK
>
>
> ________________________________
> From: himykabibble <jagboy@...>
> To: DynoMotion@yahoogroups.com
> Sent: Wednesday, January 11, 2012 3:51 PM
> Subject: [DynoMotion] Re: Jogging Problem
>
>
> Â
> Tom,
>
> Haven't tried halting my program, but I can do that tomorrow, and see what happens.
>
> I expect E-Stop does disabled the axes within KFlop, but I would like to also negate a Pin that will drop my main power contactor, to de-power the drives. Is there a way to do that?
>
> Regards,
> Ray L.
>
> --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> >
> > Hi Ray,
> > ÃÂ
> > I can't think of how that oscillation could be happening.ÃÂ One overshoot could happen if while at high speed the target position was set too close to be able to stop.ÃÂ Does it still overshoot/oscillate with your program halted?
> > ÃÂ
> > The Screen EStop in KMotionCNC should disable all the axes.ÃÂ Doesn't that occurr?
> > ÃÂ
> > Regards
> > TKÃÂ ÃÂ
> >
> >
> > ________________________________
> > From: himykabibble <jagboy@>
> > To: DynoMotion@yahoogroups.com
> > Sent: Wednesday, January 11, 2012 12:14 PM
> > Subject: [DynoMotion] Re: Jogging Problem
> >
> >
> > ÃÂ
> > Tom,
> >
> > I've found what's causing the problem but don't know what to do about it. I noticed the problem was most prevalent when stopping, so I commented out the code that issues the last move command, and I no longer get faults. What I get instead, is overshoot, and oscillation. The move goes fine, but when I stop the MPG, the A axis overshoots by about an inch, then backs up, and overshoots in the other direction, and ends up in a lightly damped oscillation that finally stops after about 30 seconds or so. The other axes don't do this, so the problem must be related to the low acceleration on the A axis. I use MoveExp to do the moves when the MPG is turning, and when I detect the MPG is no longer turning, I issue a final Move() (not MoveExp) to the same position commanded in the last MoveExp. It is that final Move that seems to be doing me in. Comment it out, and no more faults, just oscillation. I also tried a Jog(A, 0.0), but that also causes faults.
> >
> > BTW - How can I tell if the app is in E-Stop? When I hit the on-screen E-Stop button I want it to E-Stop my drives as well (i.e. - cut power). Right now, E-Stopping the app does not disable the drives, and E-stopping the drives (through the pendant or E-Stop switches) does not give a notification to KMotionCNC that state has changed. I assume it would be advisable for my Init to monitor the E-Stop switch input, and disable all axes if it goes active, right? And that will, in turn, notify KMotionCNC?
> >
> > Regards,
> > Ray L.
> >
> > --- In DynoMotion@yahoogroups.com, "himykabibble" <jagboy@> wrote:
> > >
> > > Tom,
> > >
> > > I'll play with it some more today, and see if I can get more clues.
> > >
> > > No, all attachments disappear before they make it to the web forum. The Yahoo web forum has to be about the most primitive forum on the planet. If you haven't taken a look at it, you should sometime. a large percentage of messages come through kinda trashed - lots of weird characters, formatting completely whacked, etc. I don't think it's changed since the '90s....
> > >
> > > Regards,
> > > Ray L.
> > >
> > > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > > >
> > > > Hi Ray,
> > > > ÃâÃÂ
> > > > You said you never use coordinated moves so let's put that out of the discussion.
> > > > ÃâÃÂ
> > > > Jogging, MDI Rapids, GCode Rapids all do consider the Jerk Limit and work OK
> > > > ÃâÃÂ
> > > > MoveExp does not have any Jerk Limit and fails.
> > > > ÃâÃÂ
> > > > Good chance it is something else entirely but it is a possibility.
> > > > ÃâÃÂ
> > > > Regarding the attachments.ÃâàOn the Yahoo Web interface if you scroll down to the bottom of the message doesn't it show the attachments?
> > > > ÃâÃÂ
> > > > Regards
> > > > TK
> > > > ÃâÃÂ
> > > > ÃâÃÂ
> > > >
> > > > From: himykabibble <jagboy@>
> > > > To: DynoMotion@yahoogroups.com
> > > > Sent: Tuesday, January 10, 2012 11:23 PM
> > > > Subject: [DynoMotion] Re: Jogging Problem
> > > >
> > > >
> > > > ÃâÃÂ
> > > > Tom,
> > > >
> > > > I'm confused.... Coordinated moves will not be controlling jerk at all, right? Isn't that equivalent to an infinite jerk? Why would coordindated moves work OK, but MoveExp not? I would expect, if anything, just the opposite.
> > > >
> > > > It is already taking a long time to stop. In fact, only when jogging, with the pendant, it typically over-shoots by about an inch, then backs up.
> > > >
> > > > In going over my code a while ago, I did find something that doesn't "smell" right, so I'll play with it some more tomorrow, and see if I'm right.
> > > >
> > > > BTW - I use the web (primitive) forum, so didn't get any of your attachments.
> > > >
> > > > Regards,
> > > > Ray L.
> > > >
> > > > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > > > >
> > > > > Hi Ray,
> > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > I ran a test and captured some data.ÃÆ'ââ¬Å¡ÃâàIt seems MoveExp is honoring the Acceleration value correctly.ÃÆ'ââ¬Å¡ÃâàSee the attached plots.ÃÆ'ââ¬Å¡ÃâàI've also included the C program that captures the data, the data, and an Excel sheet to plot it.ÃÆ'ââ¬Å¡ÃâàThen I did a Move on the Step Response Screen with your Jerk limitation of 4e6.ÃÆ'ââ¬Å¡ÃâàAs predicted there is smoothing over the first few milliseconds which is within the first ~100 counts or so of motion.ÃÆ'ââ¬Å¡ÃâàThat could possibly make the difference.ÃÆ'ââ¬Å¡ÃâàYou might also be exciting an instability in your Servo if it isn't tuned well.
> > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > Its hard to say what is a reasonable value for Jerk.ÃÆ'ââ¬Å¡ÃâàIt is sort of like asking at what rate do you apply the brakes in your car to come to a quick but still smooth stop?ÃÆ'ââ¬Å¡ÃâàApplying the brakes gradually will tend to take longer to stop, however by applying the brakes somewhat gradually will allow harder braking than what would otherwise be possible so the overall result is a stop as quick or quicker but with less shock.
> > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > From a motor standpoint it is impossible to apply instant acceleration (acceleration = torque = current).ÃÆ'ââ¬Å¡ÃâàBecause the motor has inductance and we have limited voltage it will take time to ramp up the current.ÃÆ'ââ¬Å¡ÃâàBut this effect is pretty small.ÃÆ'ââ¬Å¡ÃâàPossibly in the order of a millisecond.
> > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > So the mechanics are usually the major determining factor.ÃÆ'ââ¬Å¡ÃâàThe idea is to apply the force overÃÆ'ââ¬Å¡Ãâàperiod of time so as to not excite the major resonant frequencies of the system.ÃÆ'ââ¬Å¡ÃâàIf the resonant frequencies are around 100 Hz (10 ms period) then we should apply the force overÃÆ'ââ¬Å¡Ãâàseveral times this period.ÃÆ'ââ¬Å¡ÃâàTo apply the force overÃÆ'ââ¬Å¡Ãâà0.02 seconds the numeric value of JerkÃÆ'ââ¬Å¡Ãâàwould have to be 50X the acceleration value.
> > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > HTH
> > > > > TK
> > > > >
> > > > > From: himykabibble <jagboy@>
> > > > > To: DynoMotion@yahoogroups.com
> > > > > Sent: Tuesday, January 10, 2012 8:55 PM
> > > > > Subject: [DynoMotion] Re: Jogging Problem
> > > > >
> > > > >
> > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > Tom,
> > > > >
> > > > > I'm using Geckos, and have no encoders tied back to the KFlop, so I can't see following error.
> > > > >
> > > > > I guess I still have the KFlop accel set really low, trying to resolve this problem.
> > > > >
> > > > > What is a reasonable value for jerk? I just left what was there....
> > > > >
> > > > > Regards,
> > > > > Ray L.
> > > > >
> > > > > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > > > > >
> > > > > > heh heh Ray,
> > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > Well there is a big difference in Acceleration between KMotion and KMotion.exe.
> > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > KMotion A axis = 20,000 cnts/sec2
> > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > KMotion.exe A Axis = 5 in/sec2 x 96000 cnts/in = 480,000 cnts/sec2
> > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > but that doesn't really explain it because the big number is only used for coordinated motion in KMotionCNC which you never use.
> > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > Jogging, MDI, and GCode all use the KMotion low setting of 20,000cnts/sec2 but they do honor Jerk so the acceleration is more gradual.ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàWhere the MPG MoveExp would apply the full acceleration instantly.ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàSo that could possibly explain it, but your Jerk setting of 4e6 is so high I wouldn't think it would help that much.ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡Ãâà20,000/4e6 = 0.005 sec.
> > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > Still if it was very marginal it might.ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàWhen you move on the Step Response Screen what size following errors do you see?ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàWhat is your following error limit set at?
> > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > Regards
> > > > > > TK
> > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > >
> > > > > >
> > > > > > ________________________________
> > > > > > From: himykabibble <jagboy@>
> > > > > > To: DynoMotion@yahoogroups.com
> > > > > > Sent: Tuesday, January 10, 2012 8:01 PM
> > > > > > Subject: [DynoMotion] Re: Jogging Problem
> > > > > >
> > > > > >
> > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > Tom,
> > > > > >
> > > > > > Hey! Who you calling a jerk?? :-)
> > > > > >
> > > > > > The A axis is never used for coordinated motion - always single axis moves to set tool comp. I've moved it a whole lot by jogging and MDI, and it was used in the program I ran 5 times today, for doing tool-comp. Only the pendant causes it to fault.
> > > > > >
> > > > > > I *think* I've set everything the same in both my Init.c and KMotionCNC, but maybe you could check my numbers:
> > > > > >
> > > > > > Axis/Vel/Accel/Jerk in Init.c:
> > > > > > X&Y/70000/500000/4e+6
> > > > > > Z/51000/700000/4e+6
> > > > > > A/48000/20000/4e+6
> > > > > >
> > > > > > Axis/StepsPerInch/MaxVel(IPM)/Accel(in/sec^2) in KMotionCNC:
> > > > > > X&Y/20000/200/25
> > > > > > Z/20320/150/25
> > > > > > A/96000/30/5
> > > > > >
> > > > > > Regards,
> > > > > > Ray L.
> > > > > >
> > > > > > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > > > > > >
> > > > > > > Hi Ray,
> > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > Maybe it is a Jerk issue?ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàMoveExp should honor the Velocity and Acceleration limits but not Jerk.ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàWhat are you testing with GCode and the MDI, rapids or coordinated motion?ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > Also are the acceleration and velocity limits set the same in KMotion (counts/sec2) and KMotionCNC (in/sec^2)ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡Ãâà?
> > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > Otherwise you may want to capture some data to a file so we can see exactly what is happening.
> > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > Regards
> > > > > > > TK
> > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > >
> > > > > > >
> > > > > > > ________________________________
> > > > > > > From: himykabibble <jagboy@>
> > > > > > > To: DynoMotion@yahoogroups.com
> > > > > > > Sent: Tuesday, January 10, 2012 6:45 PM
> > > > > > > Subject: [DynoMotion] Jogging Problem
> > > > > > >
> > > > > > >
> > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > Tom,
> > > > > > >
> > > > > > > I'm having a problem jogging with my pendant, only on the A axis, which is the knee. The knee, obviously, is very heavy, and very slow, compared to the other axes. X/Y/Z will jog at 200 IPM, with acceleration of 25 in/sec^2, while A will only jog at 30 IPM with accel of 5 in/sec^2. The problem I'm having with the A axis only is that unless I turn the MPG *very* slowly, the servo faults, which suggests the acceleration limit is not being respected. This does not occur on programmed moves, either running G-code programs or using MDI. The pendant uses MoveExp for doing these moves. Any ideas where I should look?
> > > > > > >
> > > > > > > The good news is, this seems to be the only significant problem I have!
> > > > > > >
> > > > > > > Regards,
> > > > > > > Ray L.
> > > > > > >
> > > > > >
> > > > >
> > > >
> > >
> >
> |
|
| Group: DynoMotion |
Message: 3082 |
From: himykabibble |
Date: 1/12/2012 |
| Subject: Re: Jogging Problem |
Tom,
I've been able to improve it considerably by tuning. The biggest factor was the low acceleration setting for that axis. I raised it from 20,000 to 100,000, and it now behaves much better. I don't issue the final Move() for that axis, which eliminates faulting when it tries to stop. It still oscillates a just a bit when it stops, even with TAU set very small, and that is why I don't set acceleration higher, because it really hammers the poor axis when it reverses direction during the brief oscillation (about one cycle). I guess I'm not understanding why this one axis is so fussy. The other three work just fine.
What is the correct way to calculate the acceleration value that goes into the channel structure? If the axis is 96000 counts/inch, and I want an acceleration of 5 in/sec*2, what value should I be writing? Is it as simple as 96000 counts/inch * 5 inch/sec*2 = 480,000?
Regards,
Ray L.
--- In DynoMotion@yahoogroups.com, "himykabibble" <jagboy@...> wrote:
>
> Tom,
>
> On A axis the jogging issue, I suppose it is a tuning problem. If I start a jog, then kill my thread, the oscillation continues, so it is coming from the MoveExp, which tells me it is not happy with the TAU value I'm using (0.08). But, if I increase TAU, then the response on the others axes goes to hell, with over-shoots, and very sluggish stops. I suspect, at a minimum, I'll need to set a different TAU for the A axis, because I REALLY like the "feel" I have right now on the other three axes.
>
> Regards,
> Ray L.
>
> --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> >
> > Hi Ray,
> > Â
> > We should probably add that similar to what Mach3 does. But you can just monitor the enables in KFLOP and if any become disabled then do whatever you wish. Then remember to re-engage the contactor or whatever when you enable the axes.
> > Â
> > Regards
> > TK
> >
> >
> > ________________________________
> > From: himykabibble <jagboy@>
> > To: DynoMotion@yahoogroups.com
> > Sent: Wednesday, January 11, 2012 3:51 PM
> > Subject: [DynoMotion] Re: Jogging Problem
> >
> >
> > Â
> > Tom,
> >
> > Haven't tried halting my program, but I can do that tomorrow, and see what happens.
> >
> > I expect E-Stop does disabled the axes within KFlop, but I would like to also negate a Pin that will drop my main power contactor, to de-power the drives. Is there a way to do that?
> >
> > Regards,
> > Ray L.
> >
> > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > >
> > > Hi Ray,
> > > ÃÂ
> > > I can't think of how that oscillation could be happening.ÃÂ One overshoot could happen if while at high speed the target position was set too close to be able to stop.ÃÂ Does it still overshoot/oscillate with your program halted?
> > > ÃÂ
> > > The Screen EStop in KMotionCNC should disable all the axes.ÃÂ Doesn't that occurr?
> > > ÃÂ
> > > Regards
> > > TKÃÂ ÃÂ
> > >
> > >
> > > ________________________________
> > > From: himykabibble <jagboy@>
> > > To: DynoMotion@yahoogroups.com
> > > Sent: Wednesday, January 11, 2012 12:14 PM
> > > Subject: [DynoMotion] Re: Jogging Problem
> > >
> > >
> > > ÃÂ
> > > Tom,
> > >
> > > I've found what's causing the problem but don't know what to do about it. I noticed the problem was most prevalent when stopping, so I commented out the code that issues the last move command, and I no longer get faults. What I get instead, is overshoot, and oscillation. The move goes fine, but when I stop the MPG, the A axis overshoots by about an inch, then backs up, and overshoots in the other direction, and ends up in a lightly damped oscillation that finally stops after about 30 seconds or so. The other axes don't do this, so the problem must be related to the low acceleration on the A axis. I use MoveExp to do the moves when the MPG is turning, and when I detect the MPG is no longer turning, I issue a final Move() (not MoveExp) to the same position commanded in the last MoveExp. It is that final Move that seems to be doing me in. Comment it out, and no more faults, just oscillation. I also tried a Jog(A, 0.0), but that also causes faults.
> > >
> > > BTW - How can I tell if the app is in E-Stop? When I hit the on-screen E-Stop button I want it to E-Stop my drives as well (i.e. - cut power). Right now, E-Stopping the app does not disable the drives, and E-stopping the drives (through the pendant or E-Stop switches) does not give a notification to KMotionCNC that state has changed. I assume it would be advisable for my Init to monitor the E-Stop switch input, and disable all axes if it goes active, right? And that will, in turn, notify KMotionCNC?
> > >
> > > Regards,
> > > Ray L.
> > >
> > > --- In DynoMotion@yahoogroups.com, "himykabibble" <jagboy@> wrote:
> > > >
> > > > Tom,
> > > >
> > > > I'll play with it some more today, and see if I can get more clues.
> > > >
> > > > No, all attachments disappear before they make it to the web forum. The Yahoo web forum has to be about the most primitive forum on the planet. If you haven't taken a look at it, you should sometime. a large percentage of messages come through kinda trashed - lots of weird characters, formatting completely whacked, etc. I don't think it's changed since the '90s....
> > > >
> > > > Regards,
> > > > Ray L.
> > > >
> > > > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > > > >
> > > > > Hi Ray,
> > > > > ÃâÃÂ
> > > > > You said you never use coordinated moves so let's put that out of the discussion.
> > > > > ÃâÃÂ
> > > > > Jogging, MDI Rapids, GCode Rapids all do consider the Jerk Limit and work OK
> > > > > ÃâÃÂ
> > > > > MoveExp does not have any Jerk Limit and fails.
> > > > > ÃâÃÂ
> > > > > Good chance it is something else entirely but it is a possibility.
> > > > > ÃâÃÂ
> > > > > Regarding the attachments.ÃâàOn the Yahoo Web interface if you scroll down to the bottom of the message doesn't it show the attachments?
> > > > > ÃâÃÂ
> > > > > Regards
> > > > > TK
> > > > > ÃâÃÂ
> > > > > ÃâÃÂ
> > > > >
> > > > > From: himykabibble <jagboy@>
> > > > > To: DynoMotion@yahoogroups.com
> > > > > Sent: Tuesday, January 10, 2012 11:23 PM
> > > > > Subject: [DynoMotion] Re: Jogging Problem
> > > > >
> > > > >
> > > > > ÃâÃÂ
> > > > > Tom,
> > > > >
> > > > > I'm confused.... Coordinated moves will not be controlling jerk at all, right? Isn't that equivalent to an infinite jerk? Why would coordindated moves work OK, but MoveExp not? I would expect, if anything, just the opposite.
> > > > >
> > > > > It is already taking a long time to stop. In fact, only when jogging, with the pendant, it typically over-shoots by about an inch, then backs up.
> > > > >
> > > > > In going over my code a while ago, I did find something that doesn't "smell" right, so I'll play with it some more tomorrow, and see if I'm right.
> > > > >
> > > > > BTW - I use the web (primitive) forum, so didn't get any of your attachments.
> > > > >
> > > > > Regards,
> > > > > Ray L.
> > > > >
> > > > > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > > > > >
> > > > > > Hi Ray,
> > > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > I ran a test and captured some data.ÃÆ'ââ¬Å¡ÃâàIt seems MoveExp is honoring the Acceleration value correctly.ÃÆ'ââ¬Å¡ÃâàSee the attached plots.ÃÆ'ââ¬Å¡ÃâàI've also included the C program that captures the data, the data, and an Excel sheet to plot it.ÃÆ'ââ¬Å¡ÃâàThen I did a Move on the Step Response Screen with your Jerk limitation of 4e6.ÃÆ'ââ¬Å¡ÃâàAs predicted there is smoothing over the first few milliseconds which is within the first ~100 counts or so of motion.ÃÆ'ââ¬Å¡ÃâàThat could possibly make the difference.ÃÆ'ââ¬Å¡ÃâàYou might also be exciting an instability in your Servo if it isn't tuned well.
> > > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > Its hard to say what is a reasonable value for Jerk.ÃÆ'ââ¬Å¡ÃâàIt is sort of like asking at what rate do you apply the brakes in your car to come to a quick but still smooth stop?ÃÆ'ââ¬Å¡ÃâàApplying the brakes gradually will tend to take longer to stop, however by applying the brakes somewhat gradually will allow harder braking than what would otherwise be possible so the overall result is a stop as quick or quicker but with less shock.
> > > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > From a motor standpoint it is impossible to apply instant acceleration (acceleration = torque = current).ÃÆ'ââ¬Å¡ÃâàBecause the motor has inductance and we have limited voltage it will take time to ramp up the current.ÃÆ'ââ¬Å¡ÃâàBut this effect is pretty small.ÃÆ'ââ¬Å¡ÃâàPossibly in the order of a millisecond.
> > > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > So the mechanics are usually the major determining factor.ÃÆ'ââ¬Å¡ÃâàThe idea is to apply the force overÃÆ'ââ¬Å¡Ãâàperiod of time so as to not excite the major resonant frequencies of the system.ÃÆ'ââ¬Å¡ÃâàIf the resonant frequencies are around 100 Hz (10 ms period) then we should apply the force overÃÆ'ââ¬Å¡Ãâàseveral times this period.ÃÆ'ââ¬Å¡ÃâàTo apply the force overÃÆ'ââ¬Å¡Ãâà0.02 seconds the numeric value of JerkÃÆ'ââ¬Å¡Ãâàwould have to be 50X the acceleration value.
> > > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > HTH
> > > > > > TK
> > > > > >
> > > > > > From: himykabibble <jagboy@>
> > > > > > To: DynoMotion@yahoogroups.com
> > > > > > Sent: Tuesday, January 10, 2012 8:55 PM
> > > > > > Subject: [DynoMotion] Re: Jogging Problem
> > > > > >
> > > > > >
> > > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > Tom,
> > > > > >
> > > > > > I'm using Geckos, and have no encoders tied back to the KFlop, so I can't see following error.
> > > > > >
> > > > > > I guess I still have the KFlop accel set really low, trying to resolve this problem.
> > > > > >
> > > > > > What is a reasonable value for jerk? I just left what was there....
> > > > > >
> > > > > > Regards,
> > > > > > Ray L.
> > > > > >
> > > > > > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > > > > > >
> > > > > > > heh heh Ray,
> > > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > Well there is a big difference in Acceleration between KMotion and KMotion.exe.
> > > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > KMotion A axis = 20,000 cnts/sec2
> > > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > KMotion.exe A Axis = 5 in/sec2 x 96000 cnts/in = 480,000 cnts/sec2
> > > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > but that doesn't really explain it because the big number is only used for coordinated motion in KMotionCNC which you never use.
> > > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > Jogging, MDI, and GCode all use the KMotion low setting of 20,000cnts/sec2 but they do honor Jerk so the acceleration is more gradual.ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàWhere the MPG MoveExp would apply the full acceleration instantly.ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàSo that could possibly explain it, but your Jerk setting of 4e6 is so high I wouldn't think it would help that much.ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡Ãâà20,000/4e6 = 0.005 sec.
> > > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > Still if it was very marginal it might.ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàWhen you move on the Step Response Screen what size following errors do you see?ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàWhat is your following error limit set at?
> > > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > Regards
> > > > > > > TK
> > > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > >
> > > > > > >
> > > > > > > ________________________________
> > > > > > > From: himykabibble <jagboy@>
> > > > > > > To: DynoMotion@yahoogroups.com
> > > > > > > Sent: Tuesday, January 10, 2012 8:01 PM
> > > > > > > Subject: [DynoMotion] Re: Jogging Problem
> > > > > > >
> > > > > > >
> > > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > Tom,
> > > > > > >
> > > > > > > Hey! Who you calling a jerk?? :-)
> > > > > > >
> > > > > > > The A axis is never used for coordinated motion - always single axis moves to set tool comp. I've moved it a whole lot by jogging and MDI, and it was used in the program I ran 5 times today, for doing tool-comp. Only the pendant causes it to fault.
> > > > > > >
> > > > > > > I *think* I've set everything the same in both my Init.c and KMotionCNC, but maybe you could check my numbers:
> > > > > > >
> > > > > > > Axis/Vel/Accel/Jerk in Init.c:
> > > > > > > X&Y/70000/500000/4e+6
> > > > > > > Z/51000/700000/4e+6
> > > > > > > A/48000/20000/4e+6
> > > > > > >
> > > > > > > Axis/StepsPerInch/MaxVel(IPM)/Accel(in/sec^2) in KMotionCNC:
> > > > > > > X&Y/20000/200/25
> > > > > > > Z/20320/150/25
> > > > > > > A/96000/30/5
> > > > > > >
> > > > > > > Regards,
> > > > > > > Ray L.
> > > > > > >
> > > > > > > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > > > > > > >
> > > > > > > > Hi Ray,
> > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > Maybe it is a Jerk issue?ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàMoveExp should honor the Velocity and Acceleration limits but not Jerk.ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàWhat are you testing with GCode and the MDI, rapids or coordinated motion?ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > Also are the acceleration and velocity limits set the same in KMotion (counts/sec2) and KMotionCNC (in/sec^2)ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡Ãâà?
> > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > Otherwise you may want to capture some data to a file so we can see exactly what is happening.
> > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > Regards
> > > > > > > > TK
> > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > >
> > > > > > > >
> > > > > > > > ________________________________
> > > > > > > > From: himykabibble <jagboy@>
> > > > > > > > To: DynoMotion@yahoogroups.com
> > > > > > > > Sent: Tuesday, January 10, 2012 6:45 PM
> > > > > > > > Subject: [DynoMotion] Jogging Problem
> > > > > > > >
> > > > > > > >
> > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > Tom,
> > > > > > > >
> > > > > > > > I'm having a problem jogging with my pendant, only on the A axis, which is the knee. The knee, obviously, is very heavy, and very slow, compared to the other axes. X/Y/Z will jog at 200 IPM, with acceleration of 25 in/sec^2, while A will only jog at 30 IPM with accel of 5 in/sec^2. The problem I'm having with the A axis only is that unless I turn the MPG *very* slowly, the servo faults, which suggests the acceleration limit is not being respected. This does not occur on programmed moves, either running G-code programs or using MDI. The pendant uses MoveExp for doing these moves. Any ideas where I should look?
> > > > > > > >
> > > > > > > > The good news is, this seems to be the only significant problem I have!
> > > > > > > >
> > > > > > > > Regards,
> > > > > > > > Ray L.
> > > > > > > >
> > > > > > >
> > > > > >
> > > > >
> > > >
> > >
> >
> |
|
| Group: DynoMotion |
Message: 3090 |
From: Tom Kerekes |
Date: 1/12/2012 |
| Subject: Re: Jogging Problem |
Hi Ray,
I don't understand the overshoot. The only think I can think of is that you are doing a MoveExp to a position far away so the axis ramps to a high speed. And the you issue a MoveExp to a place close to where it is currently. In that case it will have no choice but to overshoot. Maybe you can capture some data for me so I can determine what is happening. Or provide a simple code sequence that shows the problem. Since it is consistant it shouldn't be hard to figure out.
Yes it is that simple - multiply by the resolution.
Regards
TK
| Group: DynoMotion |
Message: 3092 |
From: himykabibble |
Date: 1/12/2012 |
| Subject: Re: Jogging Problem |
Tom,
Yes, but the "ringing" continues even when my program, is not running... As I said, it's FAR worse with the very low acceleration. I'll try to capture some data. What would you like to see? I'm thinking commanded position, and actual position over time should do it, no?
How about an answer to the second question? That will help me get my accels set properly.
Regards,
Ray L.
--- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@...> wrote:
>
> Hi Ray,
> Â
> I don't understand the overshoot.  The only think I can think of is that you are doing a MoveExp to a position far away so the axis ramps to a high speed. And the you issue a MoveExp to a place close to where it is currently. In that case it will have no choice but to overshoot. Maybe you can capture some data for me so I can determine what is happening. Or provide a simple code sequence that shows the problem. Since it is consistant it shouldn't be hard to figure out.
> Â
> Yes it is that simple - multiply by the resolution.
> Â
> Regards
> TK
>
> From: himykabibble <jagboy@...>
> To: DynoMotion@yahoogroups.com
> Sent: Thursday, January 12, 2012 12:52 PM
> Subject: [DynoMotion] Re: Jogging Problem
>
>
> Â
> Tom,
>
> I've been able to improve it considerably by tuning. The biggest factor was the low acceleration setting for that axis. I raised it from 20,000 to 100,000, and it now behaves much better. I don't issue the final Move() for that axis, which eliminates faulting when it tries to stop. It still oscillates a just a bit when it stops, even with TAU set very small, and that is why I don't set acceleration higher, because it really hammers the poor axis when it reverses direction during the brief oscillation (about one cycle). I guess I'm not understanding why this one axis is so fussy. The other three work just fine.
>
> What is the correct way to calculate the acceleration value that goes into the channel structure? If the axis is 96000 counts/inch, and I want an acceleration of 5 in/sec*2, what value should I be writing? Is it as simple as 96000 counts/inch * 5 inch/sec*2 = 480,000?
>
> Regards,
> Ray L.
>
> --- In DynoMotion@yahoogroups.com, "himykabibble" <jagboy@> wrote:
> >
> > Tom,
> >
> > On A axis the jogging issue, I suppose it is a tuning problem. If I start a jog, then kill my thread, the oscillation continues, so it is coming from the MoveExp, which tells me it is not happy with the TAU value I'm using (0.08). But, if I increase TAU, then the response on the others axes goes to hell, with over-shoots, and very sluggish stops. I suspect, at a minimum, I'll need to set a different TAU for the A axis, because I REALLY like the "feel" I have right now on the other three axes.
> >
> > Regards,
> > Ray L.
> >
> > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > >
> > > Hi Ray,
> > > ÃÂ
> > > We should probably add that similar to what Mach3 does.ÃÂ But you can just monitor the enables in KFLOP and if any become disabled then do whatever you wish.ÃÂ Then remember to re-engage the contactor or whatever when you enable the axes.
> > > ÃÂ
> > > Regards
> > > TK
> > >
> > >
> > > ________________________________
> > > From: himykabibble <jagboy@>
> > > To: DynoMotion@yahoogroups.com
> > > Sent: Wednesday, January 11, 2012 3:51 PM
> > > Subject: [DynoMotion] Re: Jogging Problem
> > >
> > >
> > > ÃÂ
> > > Tom,
> > >
> > > Haven't tried halting my program, but I can do that tomorrow, and see what happens.
> > >
> > > I expect E-Stop does disabled the axes within KFlop, but I would like to also negate a Pin that will drop my main power contactor, to de-power the drives. Is there a way to do that?
> > >
> > > Regards,
> > > Ray L.
> > >
> > > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > > >
> > > > Hi Ray,
> > > > ÃâÃÂ
> > > > I can't think of how that oscillation could be happening.ÃâàOne overshoot could happen if while at high speed the target position was set too close to be able to stop.ÃâàDoes it still overshoot/oscillate with your program halted?
> > > > ÃâÃÂ
> > > > The Screen EStop in KMotionCNC should disable all the axes.ÃâàDoesn't that occurr?
> > > > ÃâÃÂ
> > > > Regards
> > > > TKÃâàÃâÃÂ
> > > >
> > > >
> > > > ________________________________
> > > > From: himykabibble <jagboy@>
> > > > To: DynoMotion@yahoogroups.com
> > > > Sent: Wednesday, January 11, 2012 12:14 PM
> > > > Subject: [DynoMotion] Re: Jogging Problem
> > > >
> > > >
> > > > ÃâÃÂ
> > > > Tom,
> > > >
> > > > I've found what's causing the problem but don't know what to do about it. I noticed the problem was most prevalent when stopping, so I commented out the code that issues the last move command, and I no longer get faults. What I get instead, is overshoot, and oscillation. The move goes fine, but when I stop the MPG, the A axis overshoots by about an inch, then backs up, and overshoots in the other direction, and ends up in a lightly damped oscillation that finally stops after about 30 seconds or so. The other axes don't do this, so the problem must be related to the low acceleration on the A axis. I use MoveExp to do the moves when the MPG is turning, and when I detect the MPG is no longer turning, I issue a final Move() (not MoveExp) to the same position commanded in the last MoveExp. It is that final Move that seems to be doing me in. Comment it out, and no more faults, just oscillation. I also tried a Jog(A, 0.0), but that also causes faults.
> > > >
> > > > BTW - How can I tell if the app is in E-Stop? When I hit the on-screen E-Stop button I want it to E-Stop my drives as well (i.e. - cut power). Right now, E-Stopping the app does not disable the drives, and E-stopping the drives (through the pendant or E-Stop switches) does not give a notification to KMotionCNC that state has changed. I assume it would be advisable for my Init to monitor the E-Stop switch input, and disable all axes if it goes active, right? And that will, in turn, notify KMotionCNC?
> > > >
> > > > Regards,
> > > > Ray L.
> > > >
> > > > --- In DynoMotion@yahoogroups.com, "himykabibble" <jagboy@> wrote:
> > > > >
> > > > > Tom,
> > > > >
> > > > > I'll play with it some more today, and see if I can get more clues.
> > > > >
> > > > > No, all attachments disappear before they make it to the web forum. The Yahoo web forum has to be about the most primitive forum on the planet. If you haven't taken a look at it, you should sometime. a large percentage of messages come through kinda trashed - lots of weird characters, formatting completely whacked, etc. I don't think it's changed since the '90s....
> > > > >
> > > > > Regards,
> > > > > Ray L.
> > > > >
> > > > > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > > > > >
> > > > > > Hi Ray,
> > > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > You said you never use coordinated moves so let's put that out of the discussion.
> > > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > Jogging, MDI Rapids, GCode Rapids all do consider the Jerk Limit and work OK
> > > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > MoveExp does not have any Jerk Limit and fails.
> > > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > Good chance it is something else entirely but it is a possibility.
> > > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > Regarding the attachments.ÃÆ'ââ¬Å¡ÃâàOn the Yahoo Web interface if you scroll down to the bottom of the message doesn't it show the attachments?
> > > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > Regards
> > > > > > TK
> > > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > >
> > > > > > From: himykabibble <jagboy@>
> > > > > > To: DynoMotion@yahoogroups.com
> > > > > > Sent: Tuesday, January 10, 2012 11:23 PM
> > > > > > Subject: [DynoMotion] Re: Jogging Problem
> > > > > >
> > > > > >
> > > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > Tom,
> > > > > >
> > > > > > I'm confused.... Coordinated moves will not be controlling jerk at all, right? Isn't that equivalent to an infinite jerk? Why would coordindated moves work OK, but MoveExp not? I would expect, if anything, just the opposite.
> > > > > >
> > > > > > It is already taking a long time to stop. In fact, only when jogging, with the pendant, it typically over-shoots by about an inch, then backs up.
> > > > > >
> > > > > > In going over my code a while ago, I did find something that doesn't "smell" right, so I'll play with it some more tomorrow, and see if I'm right.
> > > > > >
> > > > > > BTW - I use the web (primitive) forum, so didn't get any of your attachments.
> > > > > >
> > > > > > Regards,
> > > > > > Ray L.
> > > > > >
> > > > > > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > > > > > >
> > > > > > > Hi Ray,
> > > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > I ran a test and captured some data.ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàIt seems MoveExp is honoring the Acceleration value correctly.ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàSee the attached plots.ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàI've also included the C program that captures the data, the data, and an Excel sheet to plot it.ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàThen I did a Move on the Step Response Screen with your Jerk limitation of 4e6.ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàAs predicted there is smoothing over the first few milliseconds which is within the first ~100 counts or so of motion.ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàThat could possibly make the difference.ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàYou might also be exciting an instability in your Servo if it isn't tuned well.
> > > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > Its hard to say what is a reasonable value for Jerk.ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàIt is sort of like asking at what rate do you apply the brakes in your car to come to a quick but still smooth stop?ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàApplying the brakes gradually will tend to take longer to stop, however by applying the brakes somewhat gradually will allow harder braking than what would otherwise be possible so the overall result is a stop as quick or quicker but with less shock.
> > > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > From a motor standpoint it is impossible to apply instant acceleration (acceleration = torque = current).ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàBecause the motor has inductance and we have limited voltage it will take time to ramp up the current.ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàBut this effect is pretty small.ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàPossibly in the order of a millisecond.
> > > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > So the mechanics are usually the major determining factor.ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàThe idea is to apply the force overÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡Ãâàperiod of time so as to not excite the major resonant frequencies of the system.ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàIf the resonant frequencies are around 100 Hz (10 ms period) then we should apply the force overÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡Ãâàseveral times this period.ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàTo apply the force overÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡Ãâà0.02 seconds the numeric value of JerkÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡Ãâàwould have to be 50X the acceleration value.
> > > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > HTH
> > > > > > > TK
> > > > > > >
> > > > > > > From: himykabibble <jagboy@>
> > > > > > > To: DynoMotion@yahoogroups.com
> > > > > > > Sent: Tuesday, January 10, 2012 8:55 PM
> > > > > > > Subject: [DynoMotion] Re: Jogging Problem
> > > > > > >
> > > > > > >
> > > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > Tom,
> > > > > > >
> > > > > > > I'm using Geckos, and have no encoders tied back to the KFlop, so I can't see following error.
> > > > > > >
> > > > > > > I guess I still have the KFlop accel set really low, trying to resolve this problem.
> > > > > > >
> > > > > > > What is a reasonable value for jerk? I just left what was there....
> > > > > > >
> > > > > > > Regards,
> > > > > > > Ray L.
> > > > > > >
> > > > > > > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > > > > > > >
> > > > > > > > heh heh Ray,
> > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > Well there is a big difference in Acceleration between KMotion and KMotion.exe.
> > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > KMotion A axis = 20,000 cnts/sec2
> > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > KMotion.exe A Axis = 5 in/sec2 x 96000 cnts/in = 480,000 cnts/sec2
> > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > but that doesn't really explain it because the big number is only used for coordinated motion in KMotionCNC which you never use.
> > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > Jogging, MDI, and GCode all use the KMotion low setting of 20,000cnts/sec2 but they do honor Jerk so the acceleration is more gradual.ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàWhere the MPG MoveExp would apply the full acceleration instantly.ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàSo that could possibly explain it, but your Jerk setting of 4e6 is so high I wouldn't think it would help that much.ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡Ãâà20,000/4e6 = 0.005 sec.
> > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > Still if it was very marginal it might.ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàWhen you move on the Step Response Screen what size following errors do you see?ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàWhat is your following error limit set at?
> > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > Regards
> > > > > > > > TK
> > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > >
> > > > > > > >
> > > > > > > > ________________________________
> > > > > > > > From: himykabibble <jagboy@>
> > > > > > > > To: DynoMotion@yahoogroups.com
> > > > > > > > Sent: Tuesday, January 10, 2012 8:01 PM
> > > > > > > > Subject: [DynoMotion] Re: Jogging Problem
> > > > > > > >
> > > > > > > >
> > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > Tom,
> > > > > > > >
> > > > > > > > Hey! Who you calling a jerk?? :-)
> > > > > > > >
> > > > > > > > The A axis is never used for coordinated motion - always single axis moves to set tool comp. I've moved it a whole lot by jogging and MDI, and it was used in the program I ran 5 times today, for doing tool-comp. Only the pendant causes it to fault.
> > > > > > > >
> > > > > > > > I *think* I've set everything the same in both my Init.c and KMotionCNC, but maybe you could check my numbers:
> > > > > > > >
> > > > > > > > Axis/Vel/Accel/Jerk in Init.c:
> > > > > > > > X&Y/70000/500000/4e+6
> > > > > > > > Z/51000/700000/4e+6
> > > > > > > > A/48000/20000/4e+6
> > > > > > > >
> > > > > > > > Axis/StepsPerInch/MaxVel(IPM)/Accel(in/sec^2) in KMotionCNC:
> > > > > > > > X&Y/20000/200/25
> > > > > > > > Z/20320/150/25
> > > > > > > > A/96000/30/5
> > > > > > > >
> > > > > > > > Regards,
> > > > > > > > Ray L.
> > > > > > > >
> > > > > > > > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > > > > > > > >
> > > > > > > > > Hi Ray,
> > > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > > Maybe it is a Jerk issue?ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàMoveExp should honor the Velocity and Acceleration limits but not Jerk.ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàWhat are you testing with GCode and the MDI, rapids or coordinated motion?ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > > Also are the acceleration and velocity limits set the same in KMotion (counts/sec2) and KMotionCNC (in/sec^2)ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡Ãâà?
> > > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > > Otherwise you may want to capture some data to a file so we can see exactly what is happening.
> > > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > > Regards
> > > > > > > > > TK
> > > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > >
> > > > > > > > >
> > > > > > > > > ________________________________
> > > > > > > > > From: himykabibble <jagboy@>
> > > > > > > > > To: DynoMotion@yahoogroups.com
> > > > > > > > > Sent: Tuesday, January 10, 2012 6:45 PM
> > > > > > > > > Subject: [DynoMotion] Jogging Problem
> > > > > > > > >
> > > > > > > > >
> > > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > > Tom,
> > > > > > > > >
> > > > > > > > > I'm having a problem jogging with my pendant, only on the A axis, which is the knee. The knee, obviously, is very heavy, and very slow, compared to the other axes. X/Y/Z will jog at 200 IPM, with acceleration of 25 in/sec^2, while A will only jog at 30 IPM with accel of 5 in/sec^2. The problem I'm having with the A axis only is that unless I turn the MPG *very* slowly, the servo faults, which suggests the acceleration limit is not being respected. This does not occur on programmed moves, either running G-code programs or using MDI. The pendant uses MoveExp for doing these moves. Any ideas where I should look?
> > > > > > > > >
> > > > > > > > > The good news is, this seems to be the only significant problem I have!
> > > > > > > > >
> > > > > > > > > Regards,
> > > > > > > > > Ray L.
> > > > > > > > >
> > > > > > > >
> > > > > > >
> > > > > >
> > > > >
> > > >
> > >
> >
> |
|
| Group: DynoMotion |
Message: 3095 |
From: Tom Kerekes |
Date: 1/12/2012 |
| Subject: Re: Jogging Problem |
Hi Ray,
Yes the last value commanded to MoveExp and the chx->Dest would be good,
I answered the 2nd question - Yes multiply by the Resolution (cnts/inch) to change inch units to counts:
counts
inches x --------------- = counts
inches
TK
| Group: DynoMotion |
Message: 3100 |
From: himykabibble |
Date: 1/12/2012 |
| Subject: Re: Jogging Problem |
Tom,
Sorry, missed that....
I've just played with it some more. I've upped acceleration to 480,000, which is the correct value, and that helped a whole lot. I then reduced the commanded move distance for each click of the MPG. I had to reduce it to the point I no longer reach full rapid speed (a blinding 50 IPM....), but good enough for what I need - probably 20 IPM. I stopped there, as I found a move serious problem I need to address first. I found that every once in a while, when jogging A with the pendant, suddenly the Z axis would jump! I added a printf in the code when it detects the pendant axis select switch changing, and when the A axis is selected, it sometimes bounces constantly between Z and A for several seconds. An obvious noise issue I have to fix! Odd thing is, I have it connected to the RJ45 on the KFlop, with pretty stiff pull-ups on all lines. Never does it with the switch in any other position, so may be a bad driver chip in the pendant. It's certainly not the switch itself doing that.
Regards,
Ray L.
--- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@...> wrote:
>
> Hi Ray,
> Â
> Yes the last value commanded to MoveExp and the chx->Dest would be good,
> Â
> I answered the 2nd question - Yes multiply by the Resolution (cnts/inch) to change inch units to counts:
> Â
> Â Â Â Â Â Â Â Â Â Â Â Â Â Â Â Â Â Â Â Â Â Â Â Â counts
>  inches   x      ---------------  = counts
> Â Â Â Â Â Â Â Â Â Â Â Â Â Â Â Â Â Â Â Â Â Â Â Â inches
> Â
> TK
> Â
> Â
> From: himykabibble <jagboy@...>
> To: DynoMotion@yahoogroups.com
> Sent: Thursday, January 12, 2012 2:54 PM
> Subject: [DynoMotion] Re: Jogging Problem
>
>
> Â
> Tom,
>
> Yes, but the "ringing" continues even when my program, is not running... As I said, it's FAR worse with the very low acceleration. I'll try to capture some data. What would you like to see? I'm thinking commanded position, and actual position over time should do it, no?
>
> How about an answer to the second question? That will help me get my accels set properly.
>
> Regards,
> Ray L.
>
> --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> >
> > Hi Ray,
> > ÃÂ
> > I don't understand the overshoot.ÃÂ ÃÂ The only think I can think of is that you are doing a MoveExp to a position far away so the axis ramps to a high speed.ÃÂ And the you issue a MoveExp to a place close to where it is currently.ÃÂ In that case it will have no choice but to overshoot.ÃÂ Maybe you can capture some data for me so I can determine what is happening.ÃÂ Or provide a simple code sequence that shows the problem.ÃÂ Since it is consistant it shouldn't be hard to figure out.
> > ÃÂ
> > Yes it is that simple - multiply by the resolution.
> > ÃÂ
> > Regards
> > TK
> >
> > From: himykabibble <jagboy@>
> > To: DynoMotion@yahoogroups.com
> > Sent: Thursday, January 12, 2012 12:52 PM
> > Subject: [DynoMotion] Re: Jogging Problem
> >
> >
> > ÃÂ
> > Tom,
> >
> > I've been able to improve it considerably by tuning. The biggest factor was the low acceleration setting for that axis. I raised it from 20,000 to 100,000, and it now behaves much better. I don't issue the final Move() for that axis, which eliminates faulting when it tries to stop. It still oscillates a just a bit when it stops, even with TAU set very small, and that is why I don't set acceleration higher, because it really hammers the poor axis when it reverses direction during the brief oscillation (about one cycle). I guess I'm not understanding why this one axis is so fussy. The other three work just fine.
> >
> > What is the correct way to calculate the acceleration value that goes into the channel structure? If the axis is 96000 counts/inch, and I want an acceleration of 5 in/sec*2, what value should I be writing? Is it as simple as 96000 counts/inch * 5 inch/sec*2 = 480,000?
> >
> > Regards,
> > Ray L.
> >
> > --- In DynoMotion@yahoogroups.com, "himykabibble" <jagboy@> wrote:
> > >
> > > Tom,
> > >
> > > On A axis the jogging issue, I suppose it is a tuning problem. If I start a jog, then kill my thread, the oscillation continues, so it is coming from the MoveExp, which tells me it is not happy with the TAU value I'm using (0.08). But, if I increase TAU, then the response on the others axes goes to hell, with over-shoots, and very sluggish stops. I suspect, at a minimum, I'll need to set a different TAU for the A axis, because I REALLY like the "feel" I have right now on the other three axes.
> > >
> > > Regards,
> > > Ray L.
> > >
> > > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > > >
> > > > Hi Ray,
> > > > ÃâÃÂ
> > > > We should probably add that similar to what Mach3 does.ÃâàBut you can just monitor the enables in KFLOP and if any become disabled then do whatever you wish.ÃâàThen remember to re-engage the contactor or whatever when you enable the axes.
> > > > ÃâÃÂ
> > > > Regards
> > > > TK
> > > >
> > > >
> > > > ________________________________
> > > > From: himykabibble <jagboy@>
> > > > To: DynoMotion@yahoogroups.com
> > > > Sent: Wednesday, January 11, 2012 3:51 PM
> > > > Subject: [DynoMotion] Re: Jogging Problem
> > > >
> > > >
> > > > ÃâÃÂ
> > > > Tom,
> > > >
> > > > Haven't tried halting my program, but I can do that tomorrow, and see what happens.
> > > >
> > > > I expect E-Stop does disabled the axes within KFlop, but I would like to also negate a Pin that will drop my main power contactor, to de-power the drives. Is there a way to do that?
> > > >
> > > > Regards,
> > > > Ray L.
> > > >
> > > > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > > > >
> > > > > Hi Ray,
> > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > I can't think of how that oscillation could be happening.ÃÆ'ââ¬Å¡ÃâàOne overshoot could happen if while at high speed the target position was set too close to be able to stop.ÃÆ'ââ¬Å¡ÃâàDoes it still overshoot/oscillate with your program halted?
> > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > The Screen EStop in KMotionCNC should disable all the axes.ÃÆ'ââ¬Å¡ÃâàDoesn't that occurr?
> > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > Regards
> > > > > TKÃÆ'ââ¬Å¡ÃâàÃÆ'ââ¬Å¡ÃâÃÂ
> > > > >
> > > > >
> > > > > ________________________________
> > > > > From: himykabibble <jagboy@>
> > > > > To: DynoMotion@yahoogroups.com
> > > > > Sent: Wednesday, January 11, 2012 12:14 PM
> > > > > Subject: [DynoMotion] Re: Jogging Problem
> > > > >
> > > > >
> > > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > Tom,
> > > > >
> > > > > I've found what's causing the problem but don't know what to do about it. I noticed the problem was most prevalent when stopping, so I commented out the code that issues the last move command, and I no longer get faults. What I get instead, is overshoot, and oscillation. The move goes fine, but when I stop the MPG, the A axis overshoots by about an inch, then backs up, and overshoots in the other direction, and ends up in a lightly damped oscillation that finally stops after about 30 seconds or so. The other axes don't do this, so the problem must be related to the low acceleration on the A axis. I use MoveExp to do the moves when the MPG is turning, and when I detect the MPG is no longer turning, I issue a final Move() (not MoveExp) to the same position commanded in the last MoveExp. It is that final Move that seems to be doing me in. Comment it out, and no more faults, just oscillation. I also tried a Jog(A, 0.0), but that also causes faults.
> > > > >
> > > > > BTW - How can I tell if the app is in E-Stop? When I hit the on-screen E-Stop button I want it to E-Stop my drives as well (i.e. - cut power). Right now, E-Stopping the app does not disable the drives, and E-stopping the drives (through the pendant or E-Stop switches) does not give a notification to KMotionCNC that state has changed. I assume it would be advisable for my Init to monitor the E-Stop switch input, and disable all axes if it goes active, right? And that will, in turn, notify KMotionCNC?
> > > > >
> > > > > Regards,
> > > > > Ray L.
> > > > >
> > > > > --- In DynoMotion@yahoogroups.com, "himykabibble" <jagboy@> wrote:
> > > > > >
> > > > > > Tom,
> > > > > >
> > > > > > I'll play with it some more today, and see if I can get more clues.
> > > > > >
> > > > > > No, all attachments disappear before they make it to the web forum. The Yahoo web forum has to be about the most primitive forum on the planet. If you haven't taken a look at it, you should sometime. a large percentage of messages come through kinda trashed - lots of weird characters, formatting completely whacked, etc. I don't think it's changed since the '90s....
> > > > > >
> > > > > > Regards,
> > > > > > Ray L.
> > > > > >
> > > > > > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > > > > > >
> > > > > > > Hi Ray,
> > > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > You said you never use coordinated moves so let's put that out of the discussion.
> > > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > Jogging, MDI Rapids, GCode Rapids all do consider the Jerk Limit and work OK
> > > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > MoveExp does not have any Jerk Limit and fails.
> > > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > Good chance it is something else entirely but it is a possibility.
> > > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > Regarding the attachments.ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàOn the Yahoo Web interface if you scroll down to the bottom of the message doesn't it show the attachments?
> > > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > Regards
> > > > > > > TK
> > > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > >
> > > > > > > From: himykabibble <jagboy@>
> > > > > > > To: DynoMotion@yahoogroups.com
> > > > > > > Sent: Tuesday, January 10, 2012 11:23 PM
> > > > > > > Subject: [DynoMotion] Re: Jogging Problem
> > > > > > >
> > > > > > >
> > > > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > Tom,
> > > > > > >
> > > > > > > I'm confused.... Coordinated moves will not be controlling jerk at all, right? Isn't that equivalent to an infinite jerk? Why would coordindated moves work OK, but MoveExp not? I would expect, if anything, just the opposite.
> > > > > > >
> > > > > > > It is already taking a long time to stop. In fact, only when jogging, with the pendant, it typically over-shoots by about an inch, then backs up.
> > > > > > >
> > > > > > > In going over my code a while ago, I did find something that doesn't "smell" right, so I'll play with it some more tomorrow, and see if I'm right.
> > > > > > >
> > > > > > > BTW - I use the web (primitive) forum, so didn't get any of your attachments.
> > > > > > >
> > > > > > > Regards,
> > > > > > > Ray L.
> > > > > > >
> > > > > > > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > > > > > > >
> > > > > > > > Hi Ray,
> > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > I ran a test and captured some data.ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàIt seems MoveExp is honoring the Acceleration value correctly.ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàSee the attached plots.ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàI've also included the C program that captures the data, the data, and an Excel sheet to plot it.ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàThen I did a Move on the Step Response Screen with your Jerk limitation of 4e6.ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàAs predicted there is smoothing over the first few milliseconds which is within the first ~100 counts or so of motion.ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàThat could
> possibly make the difference.ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàYou might also be exciting an instability in your Servo if it isn't tuned well.
> > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > Its hard to say what is a reasonable value for Jerk.ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàIt is sort of like asking at what rate do you apply the brakes in your car to come to a quick but still smooth stop?ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàApplying the brakes gradually will tend to take longer to stop, however by applying the brakes somewhat gradually will allow harder braking than what would otherwise be possible so the overall result is a stop as quick or quicker but with less shock.
> > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > From a motor standpoint it is impossible to apply instant acceleration (acceleration = torque = current).ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàBecause the motor has inductance and we have limited voltage it will take time to ramp up the current.ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàBut this effect is pretty small.ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàPossibly in the order of a millisecond.
> > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > So the mechanics are usually the major determining factor.ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàThe idea is to apply the force overÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡Ãâàperiod of time so as to not excite the major resonant frequencies of the system.ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàIf the resonant frequencies are around 100 Hz (10 ms period) then we should apply the force overÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡Ãâàseveral times this period.ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàTo apply the force overÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡Ãâà0.02 seconds the numeric value of
> JerkÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡Ãâàwould have to be 50X the acceleration value.
> > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > HTH
> > > > > > > > TK
> > > > > > > >
> > > > > > > > From: himykabibble <jagboy@>
> > > > > > > > To: DynoMotion@yahoogroups.com
> > > > > > > > Sent: Tuesday, January 10, 2012 8:55 PM
> > > > > > > > Subject: [DynoMotion] Re: Jogging Problem
> > > > > > > >
> > > > > > > >
> > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > Tom,
> > > > > > > >
> > > > > > > > I'm using Geckos, and have no encoders tied back to the KFlop, so I can't see following error.
> > > > > > > >
> > > > > > > > I guess I still have the KFlop accel set really low, trying to resolve this problem.
> > > > > > > >
> > > > > > > > What is a reasonable value for jerk? I just left what was there....
> > > > > > > >
> > > > > > > > Regards,
> > > > > > > > Ray L.
> > > > > > > >
> > > > > > > > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > > > > > > > >
> > > > > > > > > heh heh Ray,
> > > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > > Well there is a big difference in Acceleration between KMotion and KMotion.exe.
> > > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > > KMotion A axis = 20,000 cnts/sec2
> > > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > > KMotion.exe A Axis = 5 in/sec2 x 96000 cnts/in = 480,000 cnts/sec2
> > > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > > but that doesn't really explain it because the big number is only used for coordinated motion in KMotionCNC which you never use.
> > > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > > Jogging, MDI, and GCode all use the KMotion low setting of 20,000cnts/sec2 but they do honor Jerk so the acceleration is more gradual.ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàWhere the MPG MoveExp would apply the full acceleration instantly.ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàSo that could possibly explain it, but your Jerk setting of 4e6 is so high I wouldn't think it would help that much.ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡Ãâà20,000/4e6 = 0.005 sec.
> > > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > > Still if it was very marginal it might.ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàWhen you move on the Step Response Screen what size following errors do you see?ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàWhat is your following error limit set at?
> > > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > > Regards
> > > > > > > > > TK
> > > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > >
> > > > > > > > >
> > > > > > > > > ________________________________
> > > > > > > > > From: himykabibble <jagboy@>
> > > > > > > > > To: DynoMotion@yahoogroups.com
> > > > > > > > > Sent: Tuesday, January 10, 2012 8:01 PM
> > > > > > > > > Subject: [DynoMotion] Re: Jogging Problem
> > > > > > > > >
> > > > > > > > >
> > > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > > Tom,
> > > > > > > > >
> > > > > > > > > Hey! Who you calling a jerk?? :-)
> > > > > > > > >
> > > > > > > > > The A axis is never used for coordinated motion - always single axis moves to set tool comp. I've moved it a whole lot by jogging and MDI, and it was used in the program I ran 5 times today, for doing tool-comp. Only the pendant causes it to fault.
> > > > > > > > >
> > > > > > > > > I *think* I've set everything the same in both my Init.c and KMotionCNC, but maybe you could check my numbers:
> > > > > > > > >
> > > > > > > > > Axis/Vel/Accel/Jerk in Init.c:
> > > > > > > > > X&Y/70000/500000/4e+6
> > > > > > > > > Z/51000/700000/4e+6
> > > > > > > > > A/48000/20000/4e+6
> > > > > > > > >
> > > > > > > > > Axis/StepsPerInch/MaxVel(IPM)/Accel(in/sec^2) in KMotionCNC:
> > > > > > > > > X&Y/20000/200/25
> > > > > > > > > Z/20320/150/25
> > > > > > > > > A/96000/30/5
> > > > > > > > >
> > > > > > > > > Regards,
> > > > > > > > > Ray L.
> > > > > > > > >
> > > > > > > > > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > > > > > > > > >
> > > > > > > > > > Hi Ray,
> > > > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'âââ¬Ã 'ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Å¡ÃââÃÆ'Ã'ÃââÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'ââ¬Å¡ÃâìÃÆ'Ã'âââ¬Ã¦ÃÆ'ââ¬Å¡ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > > > Maybe it is a Jerk issue?ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'âââ¬Ã 'ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Å¡ÃââÃÆ'Ã'ÃââÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'ââ¬Å¡ÃâìÃÆ'Ã'âââ¬Ã¦ÃÆ'ââ¬Å¡ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàMoveExp should honor the Velocity and Acceleration limits but not Jerk.ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'âââ¬Ã 'ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Å¡ÃââÃÆ'Ã'ÃââÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'ââ¬Å¡ÃâìÃÆ'Ã'âââ¬Ã¦ÃÆ'ââ¬Å¡ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàWhat are you testing with GCode and the MDI, rapids or coordinated
> motion?ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'âââ¬Ã 'ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Å¡ÃââÃÆ'Ã'ÃââÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'ââ¬Å¡ÃâìÃÆ'Ã'âââ¬Ã¦ÃÆ'ââ¬Å¡ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'âââ¬Ã 'ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Å¡ÃââÃÆ'Ã'ÃââÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'ââ¬Å¡ÃâìÃÆ'Ã'âââ¬Ã¦ÃÆ'ââ¬Å¡ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > > > Also are the acceleration and velocity limits set the same in KMotion (counts/sec2) and KMotionCNC (in/sec^2)ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'âââ¬Ã 'ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Å¡ÃââÃÆ'Ã'ÃââÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'ââ¬Å¡ÃâìÃÆ'Ã'âââ¬Ã¦ÃÆ'ââ¬Å¡ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡Ãâà?
> > > > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'âââ¬Ã 'ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Å¡ÃââÃÆ'Ã'ÃââÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'ââ¬Å¡ÃâìÃÆ'Ã'âââ¬Ã¦ÃÆ'ââ¬Å¡ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > > > Otherwise you may want to capture some data to a file so we can see exactly what is happening.
> > > > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'âââ¬Ã 'ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Å¡ÃââÃÆ'Ã'ÃââÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'ââ¬Å¡ÃâìÃÆ'Ã'âââ¬Ã¦ÃÆ'ââ¬Å¡ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > > > Regards
> > > > > > > > > > TK
> > > > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'âââ¬Ã 'ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Å¡ÃââÃÆ'Ã'ÃââÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'ââ¬Å¡ÃâìÃÆ'Ã'âââ¬Ã¦ÃÆ'ââ¬Å¡ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'âââ¬Ã 'ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Å¡ÃââÃÆ'Ã'ÃââÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'ââ¬Å¡ÃâìÃÆ'Ã'âââ¬Ã¦ÃÆ'ââ¬Å¡ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'âââ¬Ã 'ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Å¡ÃââÃÆ'Ã'ÃââÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'ââ¬Å¡ÃâìÃÆ'Ã'âââ¬Ã¦ÃÆ'ââ¬Å¡ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > > >
> > > > > > > > > >
> > > > > > > > > > ________________________________
> > > > > > > > > > From: himykabibble <jagboy@>
> > > > > > > > > > To: DynoMotion@yahoogroups.com
> > > > > > > > > > Sent: Tuesday, January 10, 2012 6:45 PM
> > > > > > > > > > Subject: [DynoMotion] Jogging Problem
> > > > > > > > > >
> > > > > > > > > >
> > > > > > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'âââ¬Ã 'ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Å¡ÃââÃÆ'Ã'ÃââÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'ââ¬Å¡ÃâìÃÆ'Ã'âââ¬Ã¦ÃÆ'ââ¬Å¡ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > > > > > Tom,
> > > > > > > > > >
> > > > > > > > > > I'm having a problem jogging with my pendant, only on the A axis, which is the knee. The knee, obviously, is very heavy, and very slow, compared to the other axes. X/Y/Z will jog at 200 IPM, with acceleration of 25 in/sec^2, while A will only jog at 30 IPM with accel of 5 in/sec^2. The problem I'm having with the A axis only is that unless I turn the MPG *very* slowly, the servo faults, which suggests the acceleration limit is not being respected. This does not occur on programmed moves, either running G-code programs or using MDI. The pendant uses MoveExp for doing these moves. Any ideas where I should look?
> > > > > > > > > >
> > > > > > > > > > The good news is, this seems to be the only significant problem I have!
> > > > > > > > > >
> > > > > > > > > > Regards,
> > > > > > > > > > Ray L.
> > > > > > > > > >
> > > > > > > > >
> > > > > > > >
> > > > > > >
> > > > > >
> > > > >
> > > >
> > >
> >
> |
|
| | | | | | | | | | | | | | | |
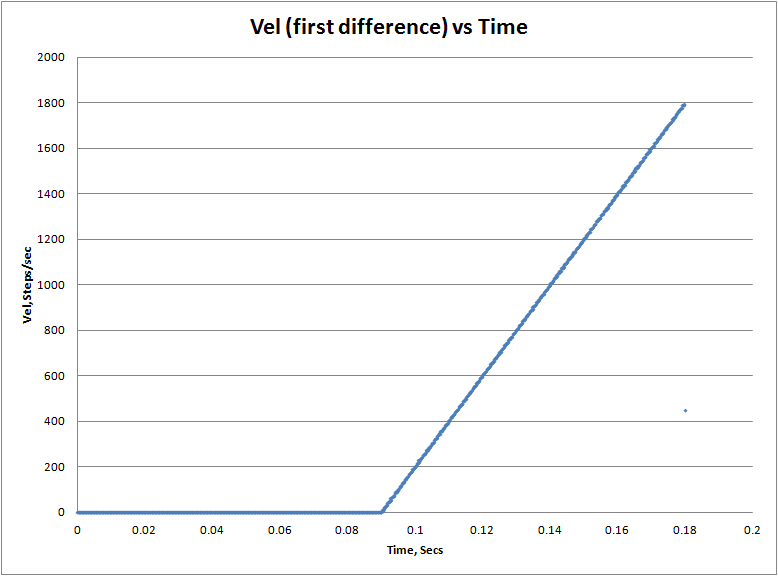{kind=link}
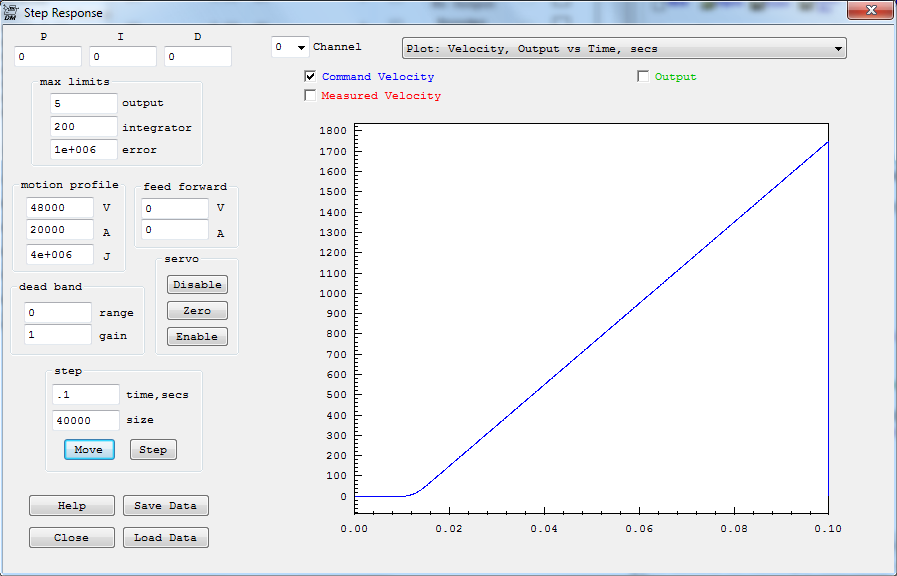{kind=link}